



ステッピングモータとサーボモータの違いとは
ステッピングモータとサーボモータの最大の違いは、制御方式と動作原理です。ステッピングモータは入力パルス数に応じて所定角度だけ回転する方式であり、パルスの管理によって位置を把握するオープンループ制御が基本です。一方、サーボモータはエンコーダにより実際の回転角を検出し、目標値との差を補正するクローズドループ制御を行います。これにより、負荷変動や外乱が発生しても、高精度かつ安定した位置決めや速度制御が可能です。
ステッピングモータ
まずは、ステッピングモータの基本構造や使用例などを解説します。
基本構造と動作原理
ステッピングモータは、入力パルスに応じて一定角度ずつ回転するモータであり、パルス数を管理することで正確な位置制御が可能です。基本的に、複数のコイルで構成されたステータ(固定子)と、永久磁石または磁化鉄心で構成されるロータ(回転子)から構成されています。順にコイルへ電気を流して磁界を発生させると、ロータが微小角度で回転します。制御方式には「フルステップ制御」と「マイクロステップ制御」があります。フルステップ制御は1パルス=1ステップで動作する最も単純な方式であるのに対し、マイクロステップ制御は電流を細かく制御することで分解能を高くして、振動や騒音を低減する方式です。これらの方式により、用途に応じた動作精度や滑らかさを実現できます。
メリット
ステッピングモータは、入力パルス数に応じて回転角度が決まるオープンループ制御で、外部センサを必要としないシンプルな構成で一定の位置決め精度を実現できます。制御回路からパルスを正しく入力するだけで移動量を把握でき、繰返し動作においても高い再現性が得られます。また、停止時には比較的大きな保持トルクが発生しているため、追加のブレーキ機構を用いずにワークを安定して固定可能です。この特性は、長時間の停止保持が必要な工程や、位置ズレを避けたい精密装置において特に有効です。さらに、構造が比較的単純であることから、導入コストやメンテナンス費用を抑えられる点もメリットとして挙げられます。
デメリット
一方で、ステッピングモータにはいくつかの制約があります。外乱や予期しない負荷が加わると動作が維持できず、指令どおりに動かなくなる「脱調」が発生します。脱調が起きると記録上の位置と実際の位置にズレが生じ、位置決め精度が大きく損なわれます。また、高速域ではコイルのインダクタンス(電流の変化を妨げる力)の影響により電流が十分に流れず、トルクが低下しやすくなります。このため、理論上は高精度な制御が可能ですが、高速動作や負荷変動の大きい用途など実用上は脱調リスクにより精度は中程度と評価されます。後述するサーボモータのようなフィードバック制御がないため、位置ズレを自動補正することができません。
主な用途と選定ポイント
ステッピングモータは、位置決め精度と制御の簡素さを活かし、3Dプリンター、CNC装置、医療機器など、高速動作を必要とせず外力が加わらない、比較的精密で繰返し動作が求められる分野で広く利用されています。外部でフィードバックを必要としないため、コスト効率の高い設計が可能です。
選定時には、要求される動作速度、トルク、精度、負荷条件を総合的に評価することが重要です。低速・高精度の位置決めには適していますが、外力が加わる環境や高速動作が必要な場合には、サーボモータの方が適しているケースも多いです。設計段階で動作環境と負荷条件を十分に検討することが必要です。
サーボモータの概要
サーボモータの基本構造や使用例などを解説します。
基本構造と動作原理
サーボモータは、モータ本体・エンコーダ・サーボドライバで構成され、常時フィードバック制御を行う点に特長があります。エンコーダとは、モータの回転位置や速度を測るセンサのことです。また、サーボドライバは指令値(位置・速度など)とエンコーダで検出した現在値との差をリアルタイムに計算し、その偏差を自動で補正する装置です。これにより、外乱や急加減速が生じても理想的な軌道を維持することができ、高応答かつ高精度な動作が可能になります。
メリット
サーボモータは、高分解能エンコーダとフィードバック制御を組み合わせることで、外乱や負荷変動が生じても偏差を即座に補正できます。エンコーダが常に現在値を高精度に検出し、その情報をサーボドライバがリアルタイムに解析するため、わずかなズレでも瞬時に補正が入り、指令値に忠実な動作を維持できます。これにより、長距離搬送や高速動作を伴う工程でも停止位置のばらつきが極めて小さく、繰返し動作においても高い再現性を確保できます。
また、サーボモータは低速から高速まで安定した動作を実現でき、サーボドライバがトルク不足を自動で補うため、高速巻取りや重量物搬送、同期搬送など幅広い高速・高負荷用途に適しています。さらに、トルクをフィードバックしながら細かく制御できるため、外部衝撃や負荷変動に対して迅速に応答し、衝突時のダメージ低減や装置寿命の延伸にも適性があります。これらの特性により、サーボモータは高精度・高応答性・高信頼性が求められる装置で広く採用されています。
デメリット
一方で、サーボモータは高精度エンコーダやサーボドライバを必要とするため、ステッピングモータと比較して導入コストが高くなる傾向があります。また、制御系の設計や調整には専門的な知識が求められ、適切なパラメータ設定を行わないと性能を十分に引き出せない場合があります。さらに、メンテナンスやトラブルシューティングにも一定の工数が必要となり、シンプルな動作やコスト重視の現場では過剰性能となることがあります。
そのため、サーボモータを導入する際には、求められる精度・速度・負荷条件を踏まえ、サーボ方式が本当に必要かどうかを慎重に検討することが重要です。
主な用途と選定ポイント
サーボモータは、ロボット制御、自動車部品の組立ライン、高速搬送装置、精密加工機など、高精度かつ高速な動作が求められる装置で広く使用されています。さらに、家電製品や医療機器など、内部機構の精密制御が必要な分野にも応用が広がっています。
選定時は、搬送質量、必要速度、分解能などの要求仕様から必要なモータ性能を算出することが基本となります。加えて、制御系や周辺機器とのインターフェース、動作時のトルクの余力(トルクリザーブ)、サーボドライバの信頼性やメンテナンス性も重要です。多軸化や将来的な設備拡張を見据える場合は、EtherCAT や CC-Link などの通信規格への対応も考慮すべき要素となります。
IKOの電動アクチュエータの選定
IKOでは、多彩な電動アクチュエータを「メカトロシリーズ」としてラインナップしており、使用するモータを柔軟に選択・搭載することが可能です。ここでは当社製品の具体例を紹介しながら、用途に応じたモータの選定基準や、最適な形番の決定方法について解説します。

ステッピングモータ・サーボモータが使用できる製品の紹介
IKOのメカトロシリーズ製品には、主に4つの駆動方式があります。
- ボールねじ駆動 … ボールねじにカップリング (軸連結部品) を介して、モータの回転力を直線運動に変換する方式。
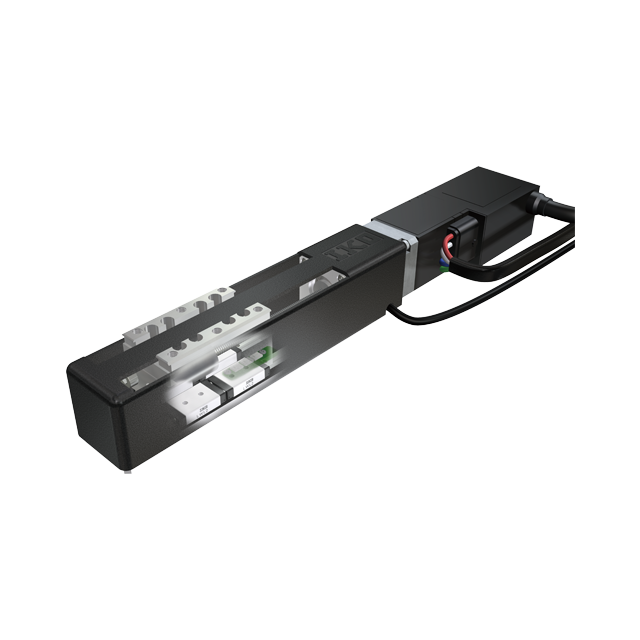
- リニアモータ駆動 … 磁石とコイルを直線または円弧状に配置し、電磁誘導の原理で直接運動させる方式。
- タイミングベルト駆動 … 回転モータでベルトを循環させ、スライドテーブルを移動させる方式。
- ウォームギア駆動 … ウォーム(ねじ状の歯車)とウォームホイール(円形の歯車)を組み合わせて回転を伝える方式。
本項では、ステッピングモータやサーボモータを直接組み合わせて使用できる3方式 (ボールねじ駆動、タイミングベルト駆動、ウォームギア駆動) を紹介します。
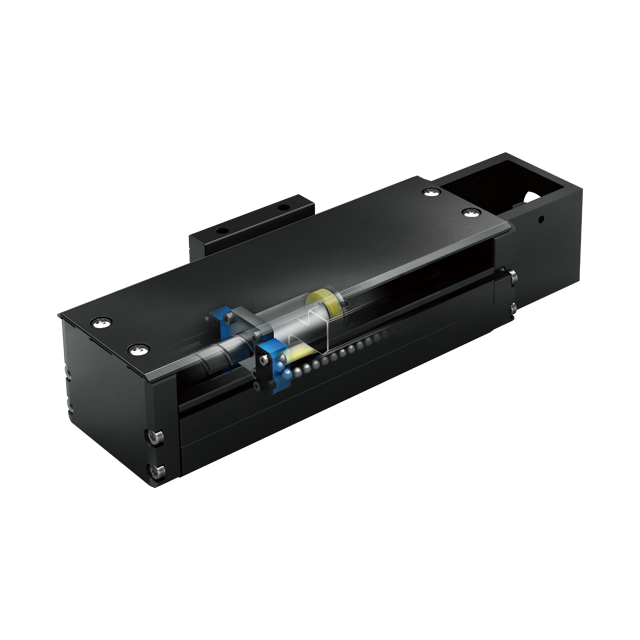
ボールねじ駆動製品の紹介
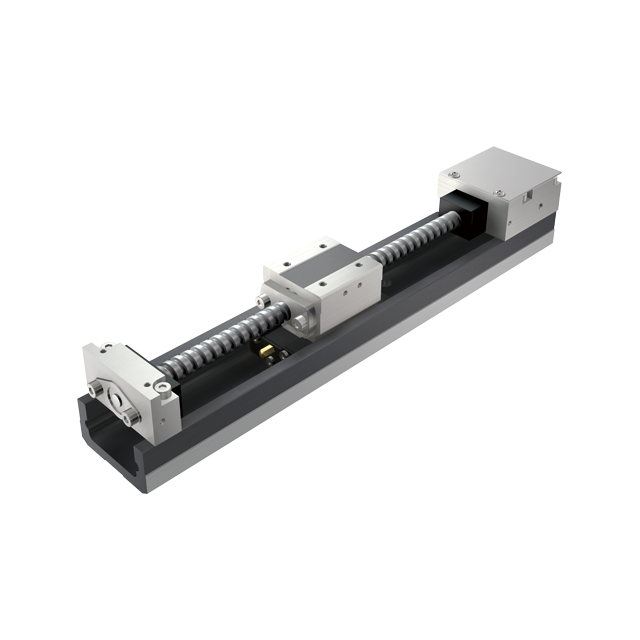
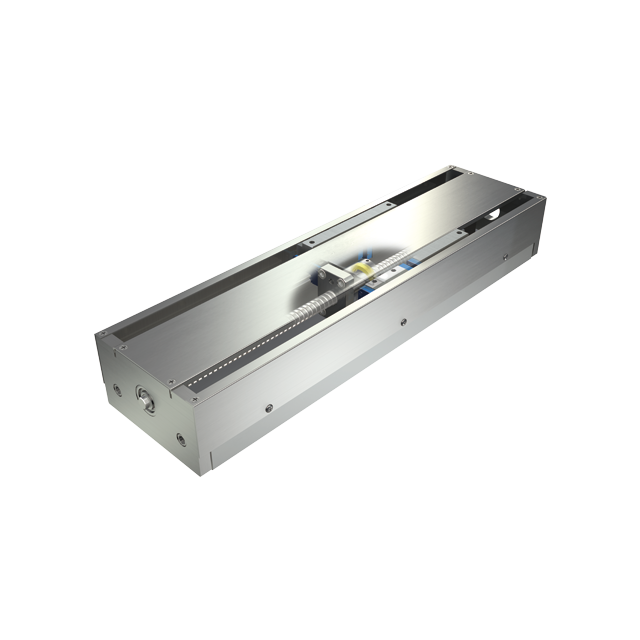
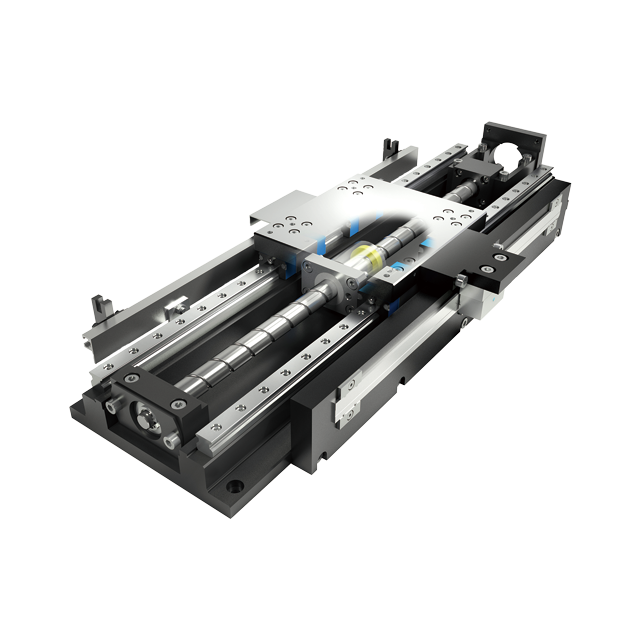
ボールねじ駆動タイプは、IKOメカトロシリーズの中でも汎用性の高い電動アクチュエータです。
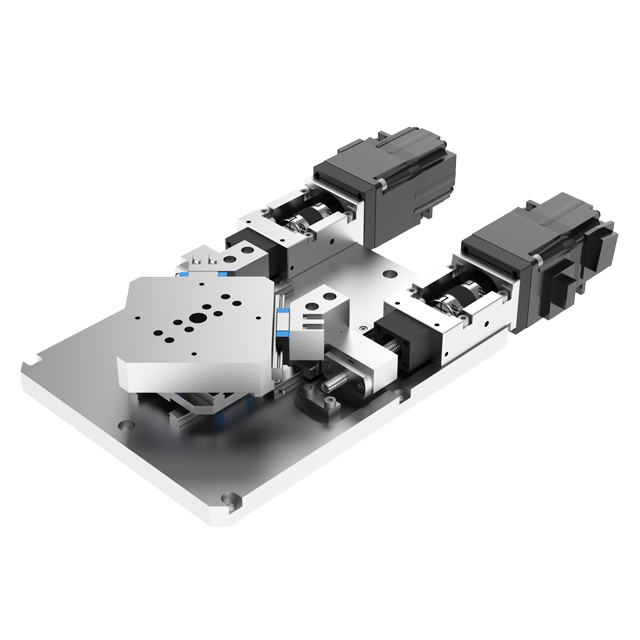
極小サイズながら高精度位置決めを実現したマイクロ精密位置決めテーブルTM、 転がり案内の採用により大きな負荷条件下でも極めて高い繰返し位置決め精度を実現した高精密位置決めテーブルTX、 独自のくさび機構で高精度な上下方向の位置決めを可能にした精密昇降テーブルTZ、 ボールねじの回転を変換機構で回転運動に変換し±1秒の繰返し位置決め精度を実現したアライメントテーブルATなどがあります。


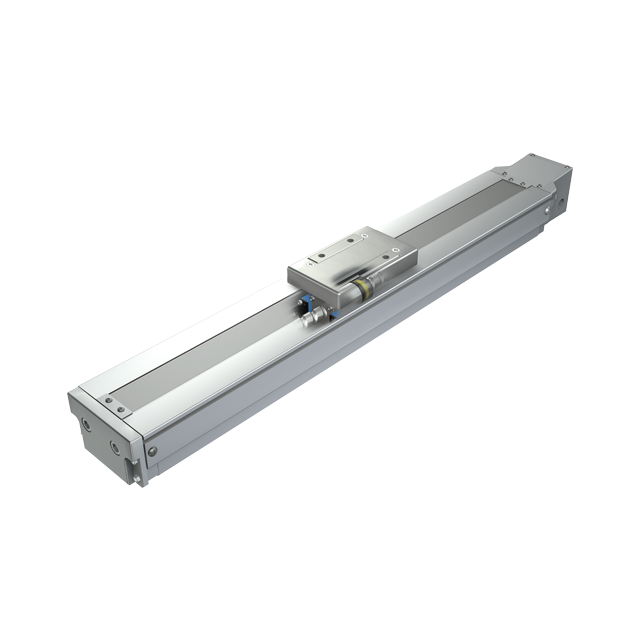
タイミングベルト駆動アクチュエータの紹介
タイミングベルト駆動タイプは、高タクトや搬送効率が重視される機械に有効なアクチュエータです。
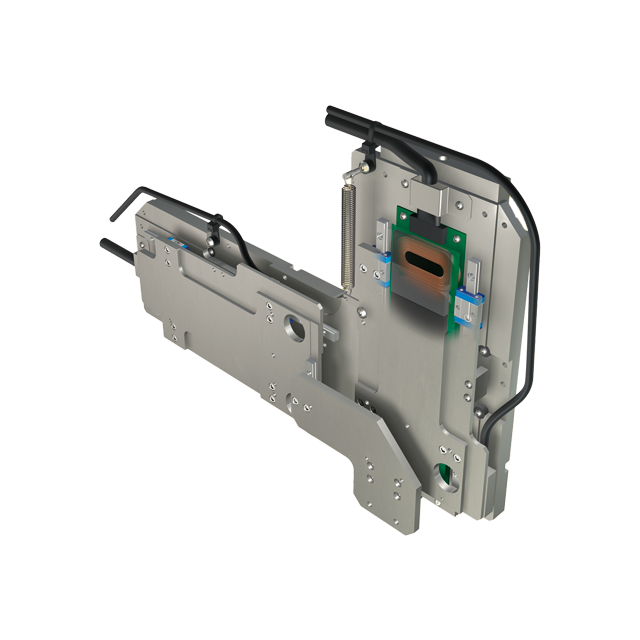
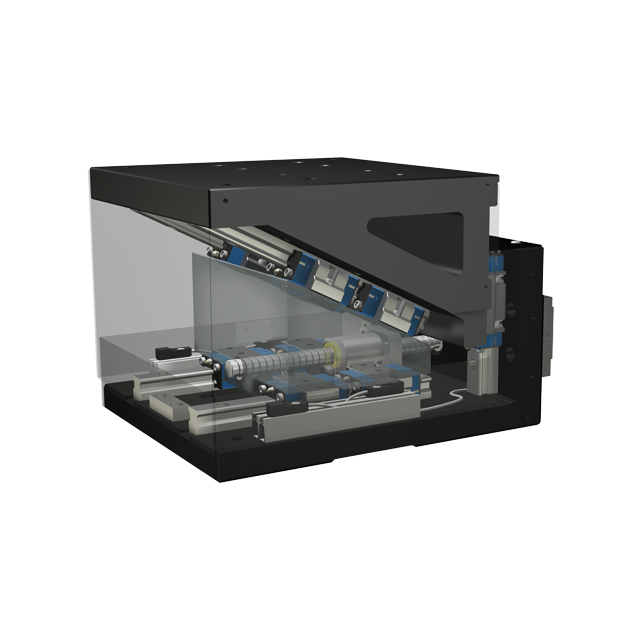
精密位置決めテーブルLBは、耐久性に優れた高張力スチールコード入りタイミングベルトを採用しており、最高速度1500 mm/sの高速運転が可能なロングストロークタイプの位置決めテーブルです。

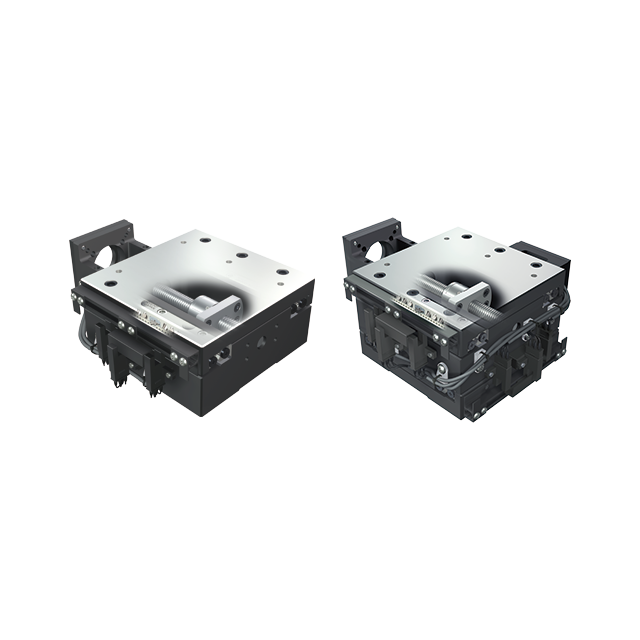
ウォームギア駆動メカトロの紹介
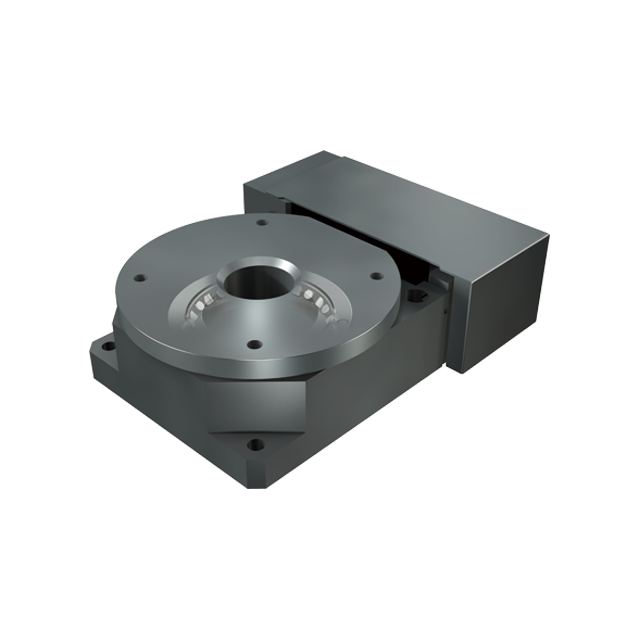
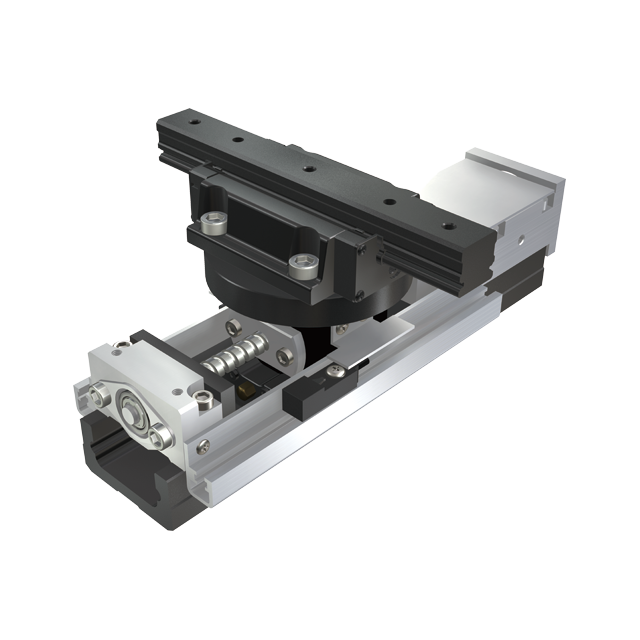
ウォームギア駆動は、ねじ歯車 (ウォーム) と、それにかみ合う歯車 (ウォームホイール) を組み合わせた機構で、高い減速比を得られるため、高負荷・高トルクが必要な条件に最適です。
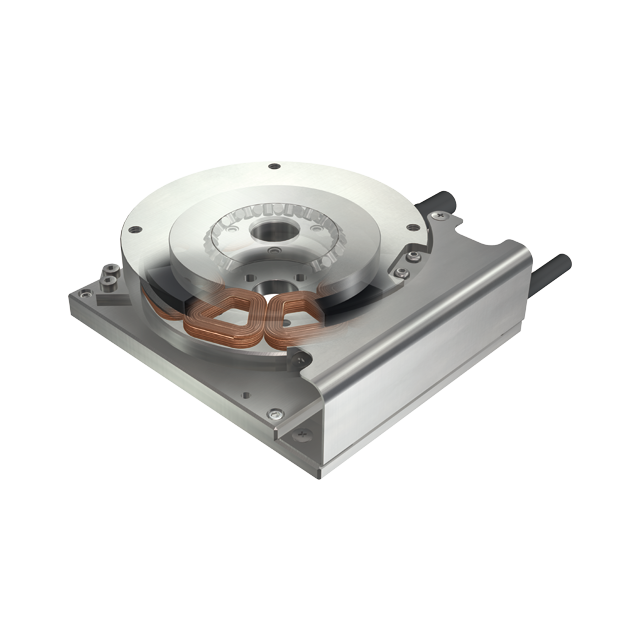
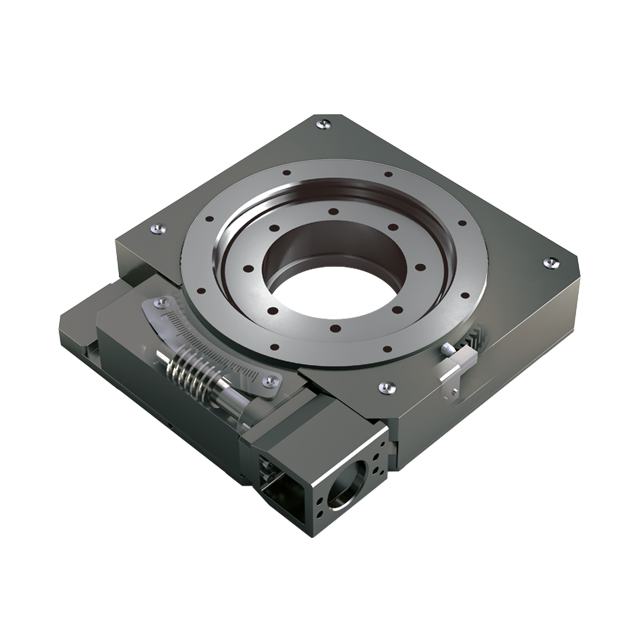
回転ステージSKは、IKOのクロスローラベアリングを採用しており、直接テーブルとすることで高剛性・低断面を実現した電動ロータリアクチュエータです。
当社アクチュエータとステッピングモータとの組み合わせが推奨できる例
低速運転や外乱の影響を無視できる条件で使用される場面では、ステッピングモータの採用を推奨します。コンシューマー向け製品に適用してコストダウンを図ることも可能です。
例えば半導体検査装置において、上下方向の位置決めにステッピングモータと精密昇降テーブルTZを採用頂いた事例があります。
当社アクチュエータとサーボモータとの組み合わせが推奨できる例
精密加工機のワーク移動部や遠隔手術ロボットのアーム部など、高い精度と確実性が求められるアプリケーションには、位置フィードバックと自動補正が可能なサーボモータの採用を推奨します。
例としては、NC研削盤の研削砥石を案内する機構にサーボモータと高精密位置決めテーブルTXを採用いただいた実績があります。
まとめ
ステッピングモータとサーボモータには、それぞれ明確な特性と適した用途があります。構造がシンプルで位置決めを容易に行いたい場合にはステッピングモータが有効で、高精度かつ高速応答が求められる場面ではサーボモータが有効です。本稿でご紹介した違いを踏まえていただくことで、装置の目的や要求仕様に最適なモータ選定が行いやすくなります。下記にステッピングモータとサーボモータの違いをまとめた表を参考に示します。
| 比較項目 | ステッピングモータ | サーボモータ |
|---|---|---|
| 制御方式 | オープンループ制御 | クローズドループ制御 (フィードバック制御) |
| 精度 | 中 (脱調リスク有り) |
高 (ズレを常時補正) |
| 速度域 | 低~中速 | 低速~高速 |
| トルク | 低~中 | 高 (広範囲で安定) |
| コスト | 低 | やや高 |
| 導入難易度 | 低 | 高 (制御系の設計・調整・保守が必要) |
| 適したアプリケーション | 単純な位置決め・低コスト需要 | 高速・高精度・多軸/変動負荷制御 |
当社では、サーボモータ・ステッピングモータを適用可能なメカトロ製品を多数取りそろえ、お客様のご要望や現場課題に応じた選定サポートやカスタマイズにも対応しています。ぜひ、皆さまの機器設計や改善の一助としてお役立ていただければ幸いです。
関連製品
本記事に関するIKOメカトロ製品の一部を以下に掲載しています。製品の詳細につきましては弊社までお問い合わせください。