


エンコーダとは何か?
エンコーダは、物体の位置や角度を高精度に測定し、デジタル信号として出力する装置です。機械の動きを可視化し、自動制御や精密加工、品質向上を支えます。特に工作機械や産業用ロボットなどの、繰り返し動作を制御するために必要不可欠な存在です。
エンコーダの役割
エンコーダは、機械の動作を可視化し、正確な制御を実現するための重要な要素です。例えば、工作機械のテーブルをμm単位で動かす際には、現在位置をリアルタイムで検出してコントローラへ伝えることで、任意の位置での動作や停止が可能です。さらに、摩耗や荷重のズレ、経年劣化による誤差を補正しながら位置情報を検出するため、製造データの取得が可能であり、品質保証の観点でも役立ちます。
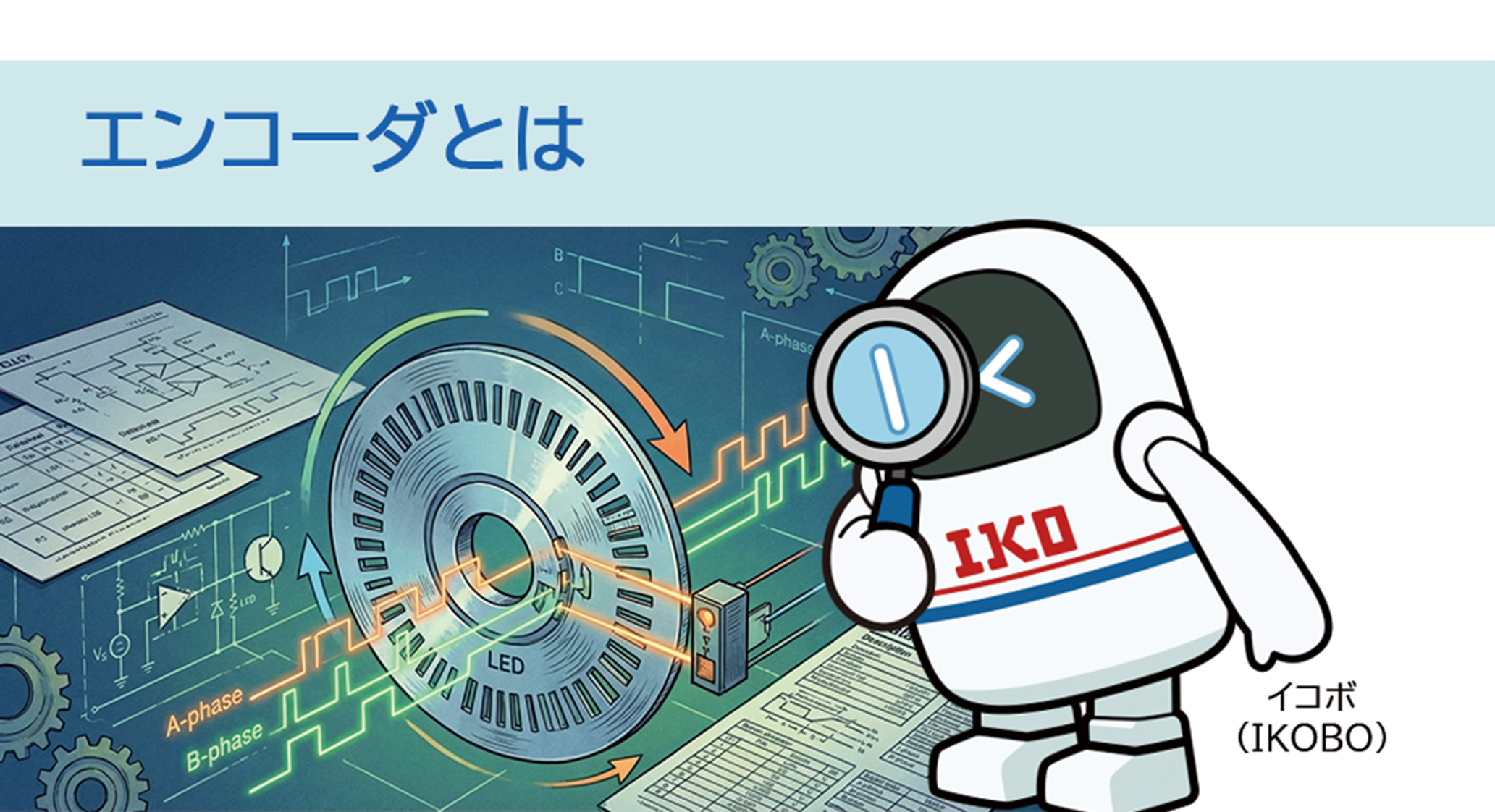
エンコーダの基本的な構造と仕組み
エンコーダは、「スケール (目盛)」や「ディスク (円盤)」などのパターン部品と、それを読み取る「センサ(検出素子)」から構成されます。回転軸に取り付ける場合はディスクの細かいパターンをセンサが検出して電気信号に変換し、直線移動ではスケール上のパターンを読み取ります。この仕組みは直線・回転の両方に共通しており、対象物の動きをパルスやコード信号として出力します。制御装置はこれを解析し、リアルタイムで機械制御を実現します。
エンコーダの分類
エンコーダは、構造や原理の違いから「形式」「検出方式」「位置情報の表現方式」によって分類されます。用途や目的に応じた組み合わせによって多様な分類が存在します。以下では、その詳細を解説します。
・形式から:リニアエンコーダとロータリーエンコーダ
エンコーダには、測定対象に応じて2つの形式があります。リニアエンコーダは直線運動用で、装置のスライド軸やテーブルなどの位置検出に使用されます。ロータリーエンコーダは回転運動用で、モータの回転軸やロボットの関節などの角度や回転量、回転速度の検出に用いられます。どちらも構成や動作原理は共通ですが、検出対象が異なります。
・検出方式の違いから:光学式と磁気式
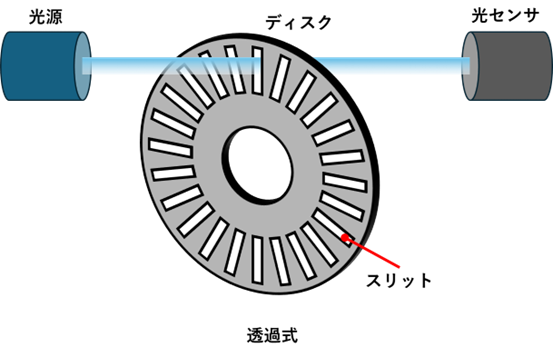
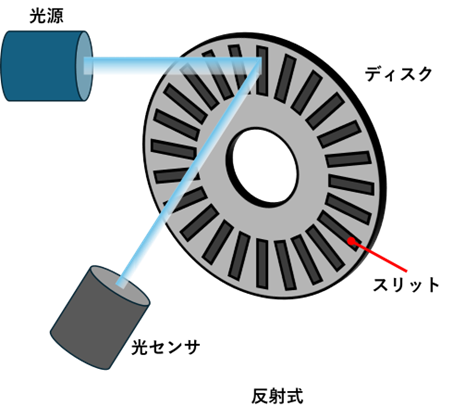
エンコーダは、検出方式によって主に「光学式」と「磁気式」に分けられます。光学式は、LEDやレーザーなどの光源から発せられた光をセンサが読み取る方式で、ディスクを透過するパターンを検出する「透過式」と、反射パターンを検出する「反射式」があります。極めて高い分解能と精度を実現できますが、油やホコリの影響を受けやすい点に注意が必要です。
磁気式は、スケールやディスクに施された磁気パターンをセンサで読み取る方式で、環境耐性に優れ、粉塵や油分が多い現場でも安定して動作します。ただし、比較的精度は低く、強磁場や動作温度範囲に制約があります。
・位置情報の表現方法の違いから:インクリメンタル型とアブソリュート型
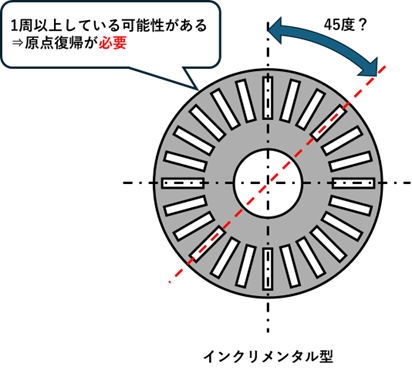
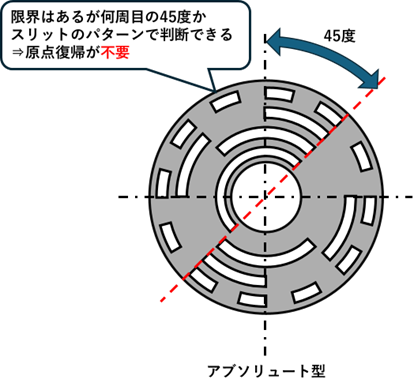
エンコーダの位置情報形式には「インクリメンタル型」と「アブソリュート型」があります。インクリメンタル型は、動作開始位置からの変化量 (相対位置) をパルス信号として出力します。コストを抑えやすく汎用性も高い一方、電源遮断で位置情報が失われるため再起動時には原点復帰が必要です。アブソリュート型は、絶対位置をデジタルコードとして出力するため、電源を切っても再起動時に正しい位置を取得でき、安全性や立ち上げ効率に優れています。
リニア (線形) エンコーダ
「リニアエンコーダ」は直線運動の精密制御を可能にする装置で、工作機械のテーブルや半導体製造装置など、高い位置決め精度が求められる現場で活用されています。ここでは、その仕組みや注意点について解説します。
リニアエンコーダの仕組み
リニアエンコーダは、一定間隔で目盛が刻まれたスケールの目盛をセンサが読み取り、直線方向の位置情報や移動量を高精度に測定します。検出原理としては、光学式が主に用いられます。
リニアエンコーダの注意点
リニアエンコーダは、スケールの目盛を読み取って位置情報を取得しますが、取り付け方法や環境によって不具合が生じることがあります。例えば、スケールやセンサの取り付けズレや振動により測定誤差が発生する場合があります。光学式では油や粉塵による目盛パターンの汚染、磁気式では強磁場による誤作動など、方式特有のリスクも存在します。そのため、設置環境の確認と定期的なメンテナンスが不可欠です。
リニアエンコーダの使用例
リニアエンコーダは、工作機械の主軸やテーブルの位置決め制御に使用されます。マシニングセンタや半導体製造装置、計測機器、ピックアンドプレースマシンなど、高速かつ高精度でμm単位の位置決めが必要な場面で活用されます。さらに、手動機やNC工作機械への後付け導入例も多く、製造現場で幅広く利用されています。
ロータリーエンコーダ
ロータリーエンコーダは回転運動の精密制御を可能にする装置で、工作機械の主軸やモータ、ロボットの関節、FA機器の回転部分などの角度や回転量を高精度にデータ化し、精密な角度制御や位置決めを実現します。
ロータリーエンコーダの仕組み
ロータリーエンコーダは、細かなパターンを施したディスクをシャフトなどの回転物に取り付け、センサがパターン変化を読み取って回転角度や回転量をデジタル信号として出力します。これにより、累計回転数や現在位置などの情報をリアルタイムで取得できます。
光学式や磁気式などの方式によって特性は異なりますが、高精度な角度・速度制御を必要とする工作機械、ロボット、位置決めテーブルなど幅広い分野で採用されています。
ロータリーエンコーダの注意点
リニアエンコーダと同様に、ディスクやセンサの取り付け精度が測定結果に大きく影響します。シャフトの芯ズレや振動、ディスクの汚れ・摩耗、高温環境などは信号ノイズや検出誤差の原因となります。特に光学式ではディスクの目盛部が油分やホコリで汚れると信号品質が著しく低下するため、定期的な清掃が不可欠です。磁気式の場合は、外部磁場の影響に注意する必要があります。
ロータリーエンコーダの使用例
ロータリーエンコーダは、CNC工作機械の主軸や回転テーブル、産業用ロボットの関節部、搬送ラインの回転センサ、インデックステーブルなど各種自動化装置で使用され、精密な位置決めや回転速度制御に利用されています。回転運動の制御・管理が求められる現場において重要な装置です。
エンコーダの選定からメンテナンスまでのポイント
精密な機械制御においてエンコーダは不可欠な装置ですが、高精度品を選ぶだけでは十分ではありません。取り付け、運用、メンテナンスの各段階を総合的に考慮し、選定に必要な条件を明確にすることがシステムの性能と信頼性の確保に繋がります。ここでは、選定からメンテナンスまでの重要事項を整理します。
選定時のポイント
エンコーダの選定で最も重要なのは、使用箇所を明確にすることです。直線運動か回転運動か、必要な分解能・精度・測定範囲といった要件を整理する必要があります。設置環境や機械特性(粉塵、温度変動、振動など)に応じて、光学式か磁気式かの検出方式を選択します。さらに、インクリメンタル型かアブソリュート型かは、システム構成や電源停止時の要件に基づき判断する必要があります。メーカーごとに得意分野やカスタマイズ対応が異なるため、装置仕様や制御システムとの適合性を含めて総合的に検討することが求められます。
取り付け時のポイント
エンコーダ本体と軸・テーブルの芯出し精度が低いと性能を十分に発揮できないため、正確な取り付けが重要です。取り付け面の平面度や剛性、振動対策、防塵・防滴カバーの設置も必要となります。さらに、静電気対策やケーブルの引き回し・固定方法にも注意が求められます。
運用時のポイント
運用時には、設置環境の維持と異常検知が可能なシステム構築が必要です。粉塵や油分、温度変化、磁場、振動など過酷な条件下では、防塵・防油対策や、信号品質の監視が求められます。近年は、エンコーダのフィードバック信号を常時監視し、異常検知時にアラームを出力するシステムも普及しています。
メンテナンス時のポイント
エンコーダの性能を長期に渡り維持するためには、定期的な清掃と点検が不可欠です。特に光学式リニアエンコーダでは、スケールやディスクの透明部分に油やホコリが付着すると信号検出が不安定になります。汚れや損傷の目視点検、必要に応じた清掃、さらにケーブル・コネクタ部の緩み・断線の確認も重要です。磁気式の場合も、センサ周辺への金属粉の付着や磁気パターンの劣化を確認する必要があります。異常の兆候を早期に把握することで、不具合防止や生産停止リスクの低減に繋がります。加えて、メーカー推奨周期に基づく点検・キャリブレーションを計画的に実施することが望まれます。

エンコーダの使用例
エンコーダは「動き」をμm・秒単位で数値化する装置として、現代のものづくりから最先端の自動化技術・ロボット・研究開発まで、幅広い分野で欠かせない存在です。ここでは、具体的な業界や用途ごとの活用例と、それに関連する技術動向をご紹介します。
工作機械における活用
工作機械は切削や研削・穴あけなど、全ての動作に高精度と再現性が求められます。これを支えているのが、エンコーダです。マシニングセンタやCNC旋盤のX・Y・Z軸にはリニアエンコーダを取り付け、テーブルや主軸の位置を直接検出します。これにより、ボールねじやギヤによるバックラッシや熱膨張などの誤差を補正できます。主軸や回転軸ではロータリーエンコーダにより高速かつ高精度な回転制御や工具位置の可視化が可能となり、高品質な加工や自動化ラインの実現に貢献しています。
産業機械における利用
エンコーダは搬送装置、自動組立機、半導体製造装置など様々な産業用機械で活用されています。多軸搬送システムでは各軸の位置を複数のエンコーダで常時監視し、製品や部品の移動・投入・取り出しを正確に制御します。品質検査装置では検出ヘッドやプローブの位置情報を取得し、安定した検査精度を実現します。さらに、包装機、印刷機、自動ラベリング機など、高速・高頻度の連続動作や繰り返し精度が求められる現場でも広く導入されています。
ロボット技術での活用
ロボット分野では、エンコーダはアームや関節、エンドエフェクタ (先端工具) の精密な位置・角度検出に不可欠です。特に医療用遠隔手術ロボットでは、術者の操作をリアルタイムで忠実に再現するため、各関節に高精度なロータリーエンコーダ、直線動作部にはリニアエンコーダが組み込まれています。エンコーダ信号によりμm単位の動きでも正確に同期し、繊細な外科手術を安全に支援します。さらに、事故防止や自動補正、記録のための動作トレースにも活用され、高度医療技術の発展に大きく貢献しています。
エンコーダを用いた次世代技術の動向と展望
近年では、クローズドループ制御によりμm単位の精度の位置決めを実現するエンコーダや、IoT対応で遠隔監視・自己診断機能を備えたスマートエンコーダが登場しています。さらに、AI連携による故障予知、ワークピースに直接取り付け可能な超薄型・軽量タイプ、光ファイバ式、バッテリーレスアブソリュート型など多彩なバリエーションも開発されています。協働ロボット、医療機器、半導体封止工程など新たな成長分野でも高機能エンコーダの導入が進み、製造現場のスマート化・自動化に必須な存在となっています。
IKOの高精度位置決めテーブルについて
IKOでは、『IKOメカトロシリーズ』と称して電動アクチュエータを開発・製造しており、リニアエンコーダ・ロータリーエンコーダを搭載することで高精度な位置決めを実現しています。
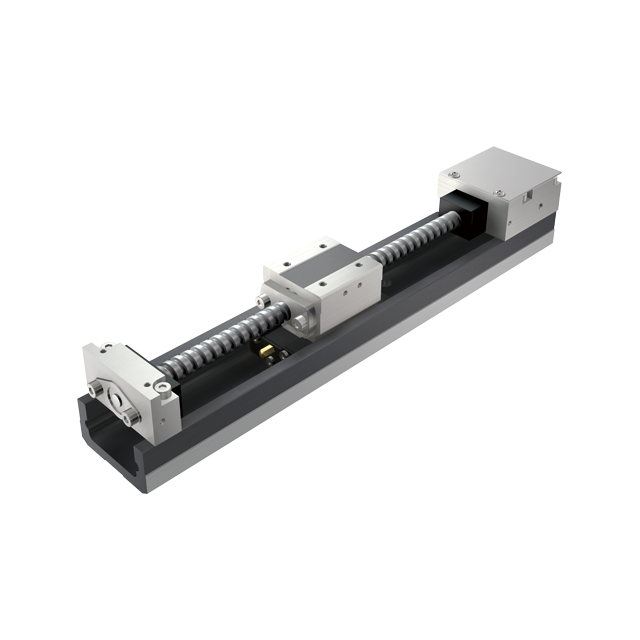
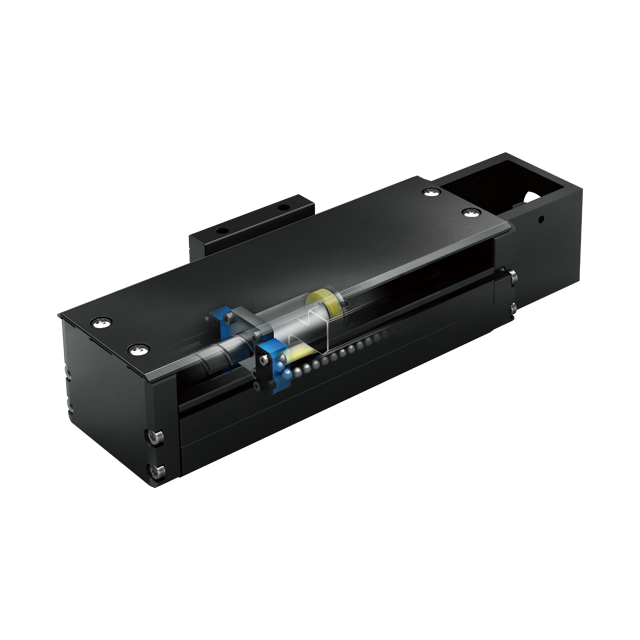
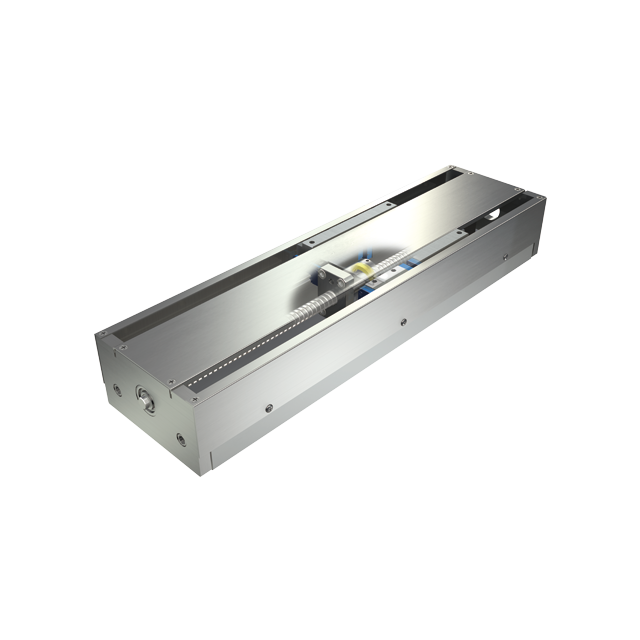
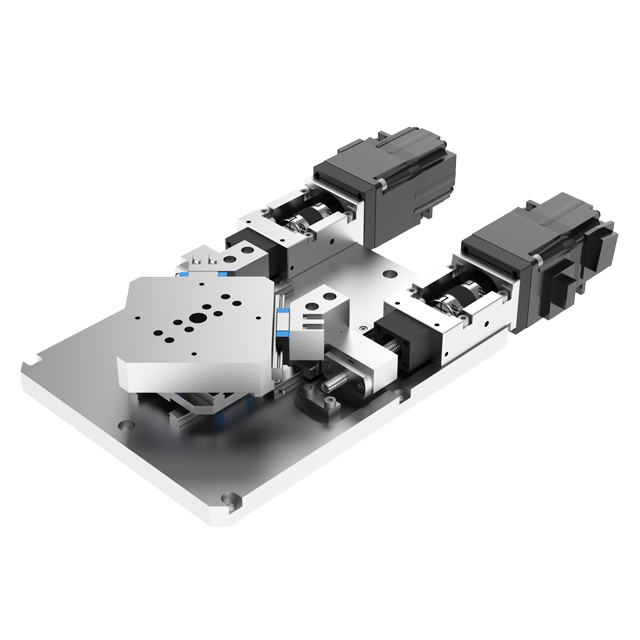
高精密位置決めテーブルTX
高精度位置決めテーブルTXは、ボールねじ駆動の電動アクチュエータです。ACサーボモータを搭載でき、リニアエンコーダはインクリメンタル型・アブソリュート型から選択可能です。最小分解能0.01µmで位置を正確に指示でき、リニアエンコーダからのフィードバックを用いたフルクローズドループ制御により、繰り返し位置決め精度±0.5µmという高精度な制御を実現します。
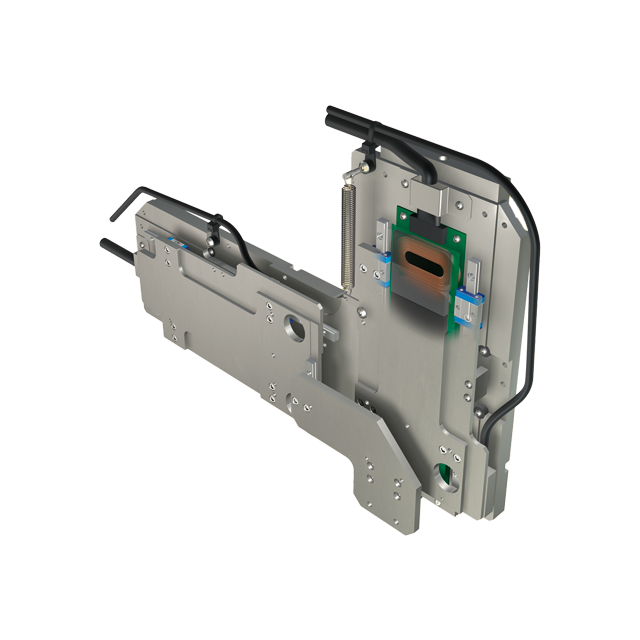
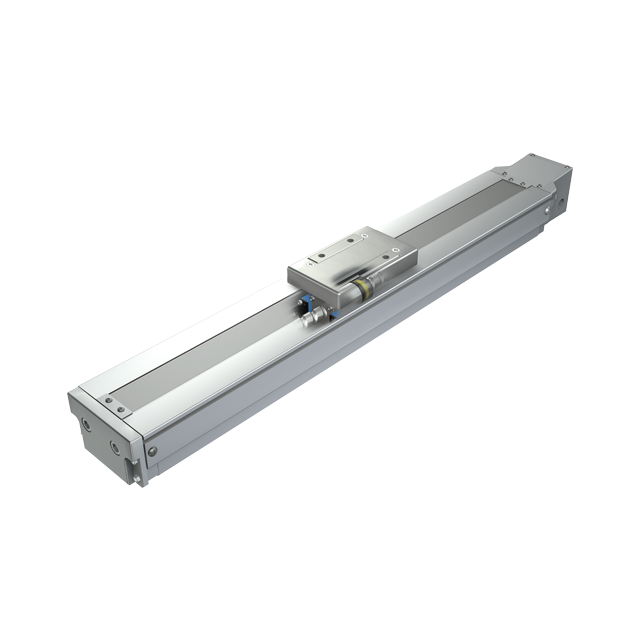
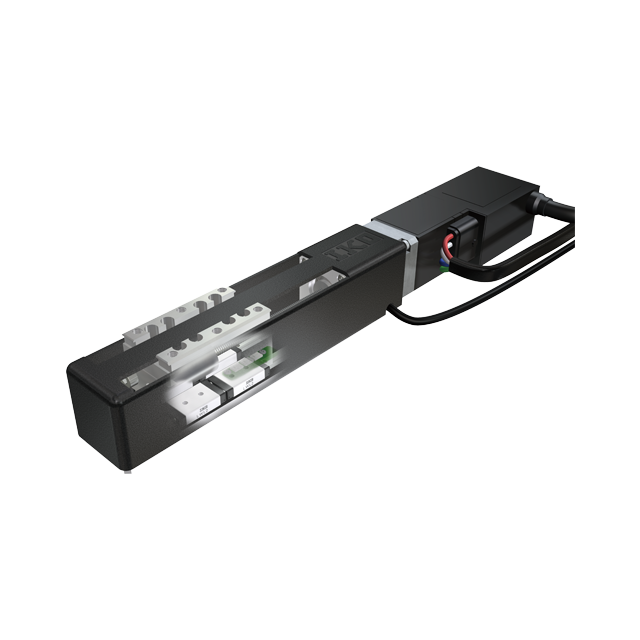
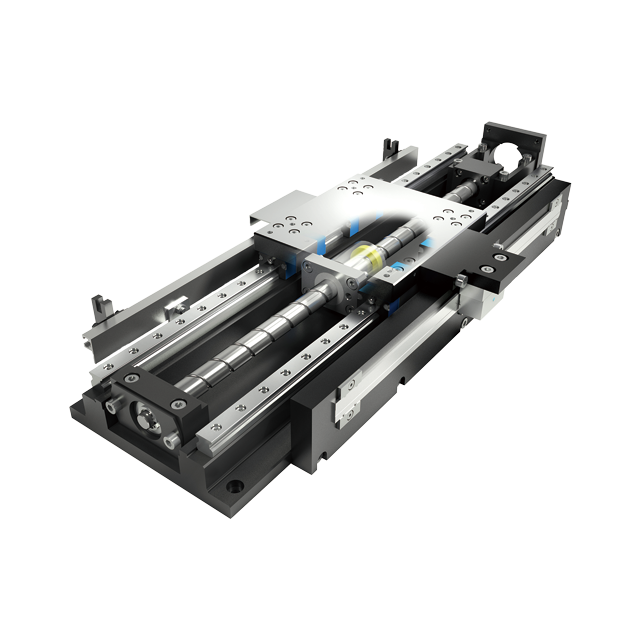
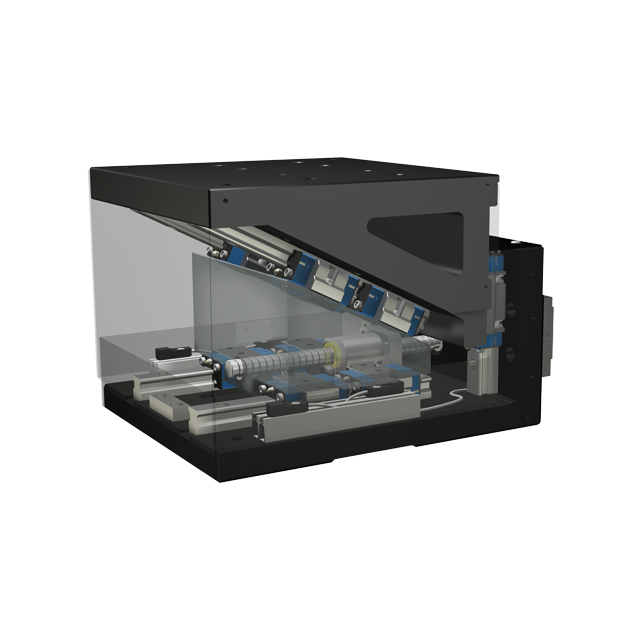
リニアモータテーブルLT
リニアモータテーブルLTは、リニアモータ駆動の電動アクチュエータです。リニアエンコーダはTXと同様にインクリメンタル型・アブソリュート型から選択可能で、最小分解能0.05μmで位置指令が行えます。リニアエンコーダからのフィードバックを用いたフルクローズドループ制御により、繰り返し位置決め精度±0.5μmという高精度を実現します。
さらにアブソリュート型を選択すれば、電源再投入時の原点位置検出や磁極位置検出が不要となり、高分解能でありながらテーブルの高速化も可能です。耐ノイズ性の向上など、様々な利点も備えています。
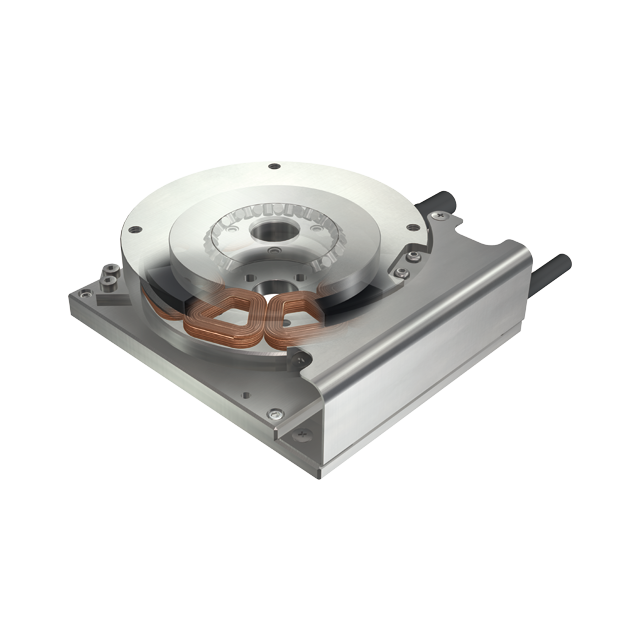
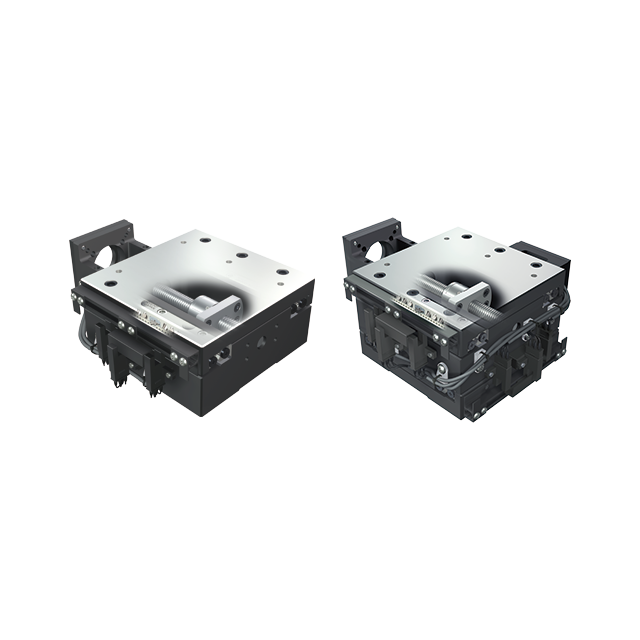
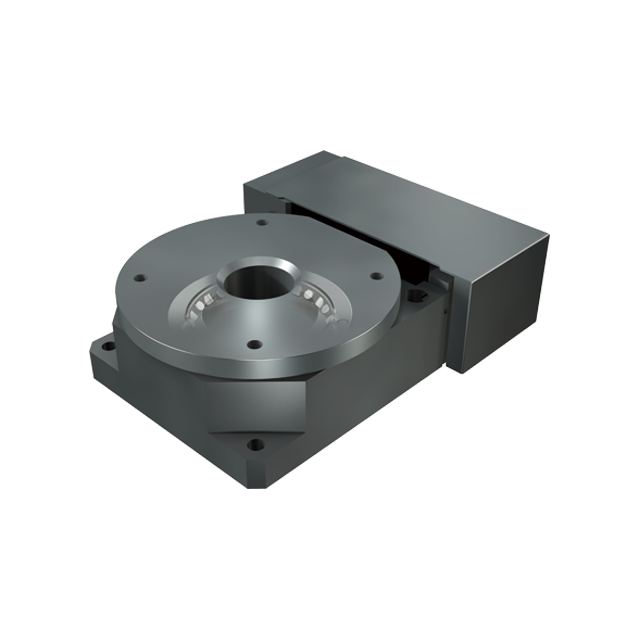
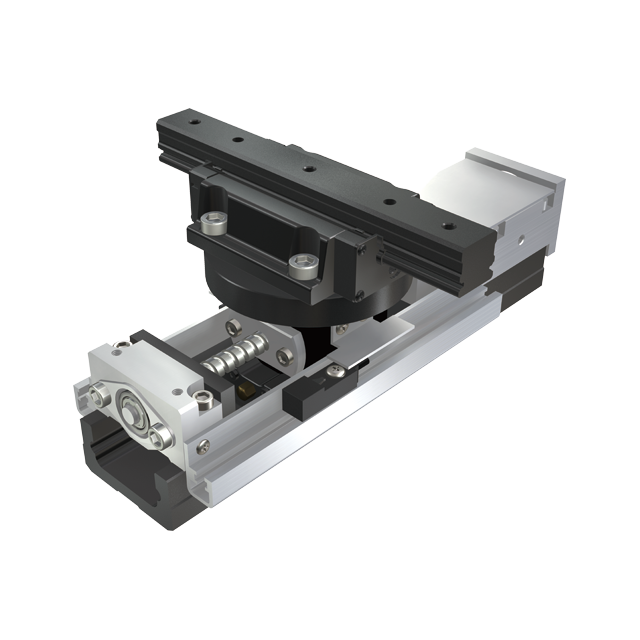
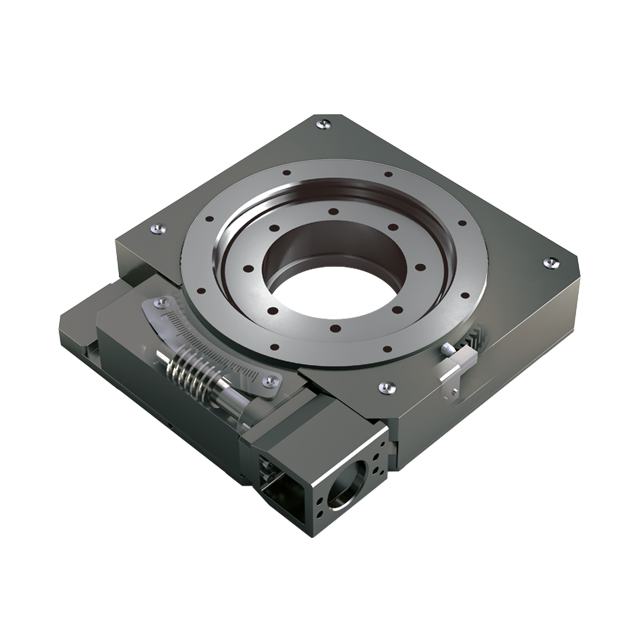
アライメントステージSA
アライメントステージSAは、リニアモータテーブルLTと同様にリニアモータ駆動の電動アクチュエータですが、SA…DE/S仕様及びSA…DE/T仕様では回転動作が可能です。これらのモデルには最小分解能0.25秒の高精度ロータリーエンコーダを搭載しており、微細な角度での位置指令が可能です。さらにリニアモータ駆動とフルクローズドループ制御により、繰り返し位置決め精度±0.5秒という超高精度を実現します。

まとめ
エンコーダは精密加工や自動化、ロボット技術を支える重要な装置です。リニアエンコーダ・ロータリーエンコーダ、光学式・磁気式、インクリメンタル型・アブソリュート型など多彩な方式があり、目的や環境に応じた選択が必要です。選定、取り付け、メンテナンスによる精度確保と信頼性維持が重要です。工作機械や産業機械、医療ロボットなど幅広い分野で活用され、IoTやAI連携による高精度化・スマート化にも貢献しています。ものづくりの品質や生産性向上に欠かせない存在です。
IKOではエンコーダ搭載の精密位置決めテーブルを開発・製造しており、標準品から高精度仕様まで柔軟に対応可能です。IKO製品にご興味がある方は、IKOまでご相談ください。
関連製品
本記事に関するIKOメカトロ製品の一部を以下に掲載しています。製品の詳細につきましては弊社までお問い合わせください。