
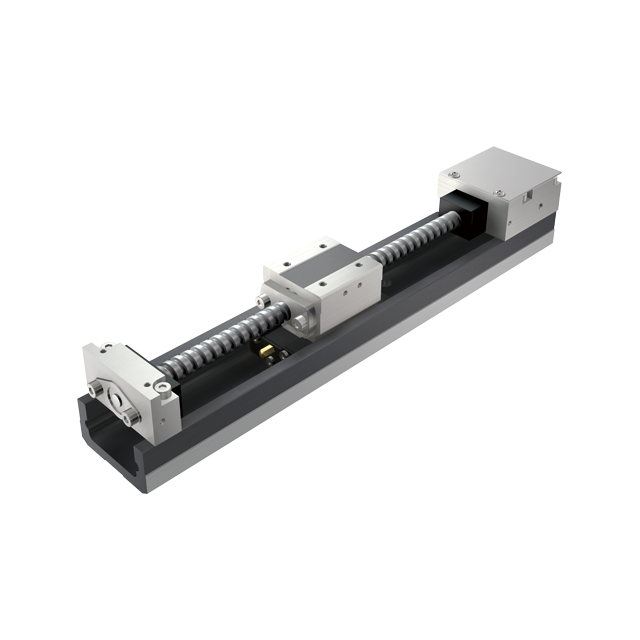


システム構成図
マイクロ精密位置決めテーブルTMには専用のドライバが用意されており、システム構成を以下に示します。ドライバの仕様については、製品カタログをご参照ください。ご注文の際は、呼び番号にて別途ご指定ください。
TM15 ACサーボモータ(Y063,Y064)システム構成
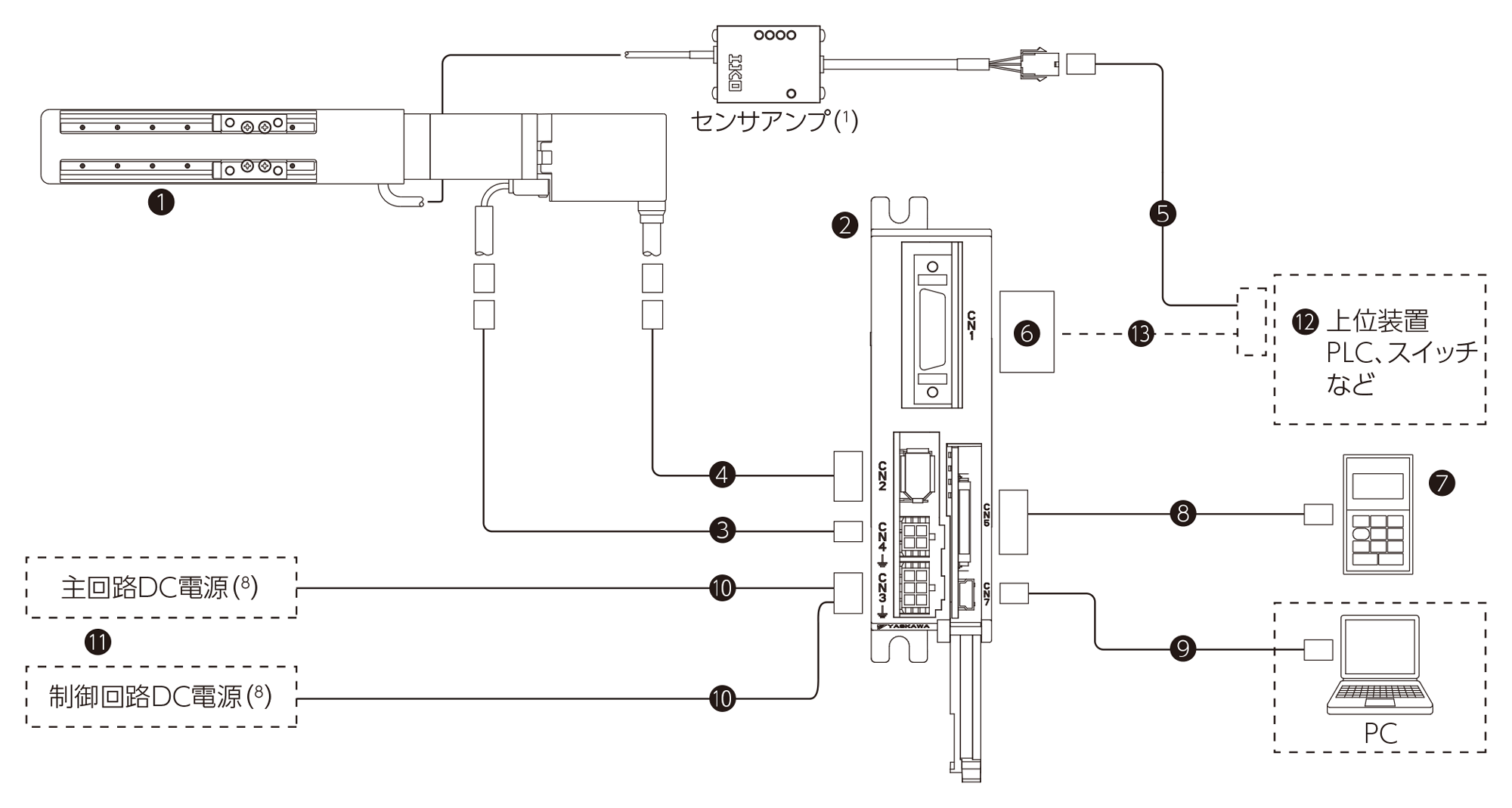
*画像クリックで拡大表示できます
| No. | 名称 | 呼び番号 | |
|---|---|---|---|
| ① | テーブル本体(モータ記号) | Y063 ACサーボモータ (標準タイプ) |
Y064 ACサーボモータ (高トルクタイプ) |
| ② | ドライバ(2) | SGDV-1R7EP1A | |
| ③ | モータコード(3m)(2)(3) | JZSP-CF1M20-03-E | |
| ④ | エンコーダコード(3m) (2)(3) |
JZSP-C7MP21-03-E | |
| ⑤ | センサ中継コード(3m) (3)(4)(5) |
TAE10W0-LC03 | |
| ⑥ | I/Oコネクタ | TAE20W1-CN(6) | |
| ⑦ | ディジタルオペレータ (2)(7) |
JUSP-OP05A-1-E | |
| ⑧ | ディジタルオペレータ中継 ケーブル(2)(7) |
JZSP-CF1S00-A3-E | |
| ⑨ | PC接続ケーブル(2)(7) | JZSP-CVS06-02-E | |
| ⑩ | 電源用ケーブル(2)(4)(8) | JZSP-CF1G00-□□-E | |
| ⑪ | 電源(9) | お客様でご用意ください。 | |
| ⑫ | 上位装置 | ||
| ⑬ | I/Oコネクタ接続ケーブル | ||
| 注(1) | センサなしを指定した場合、センサアンプは付属しません。 |
| (2) | ㈱安川電機製です。 |
| (3) | 特殊なコード長さについては、IKOにお問い合わせください。 |
| (4) | コードの上位装置側は、ばら出しとなります。 |
| (5) | 原点信号が不要な場合は、原点センサ信号(ORG)は使用しないでください。 |
| (6) | I/OコネクタTAE20W1̶CNは、スリーエムジャパン㈱製10126̶3000PE(コネクタ)と10326̶52F0-008(カバー)の組合せです。 |
| (7) | パラメータ設定の際には、ディジタルオペレータまたは汎用パソコンが必要となります。 |
| (8) | 呼び番号の□□にて1~3mまで1m単位で長さを指定します。(3mの場合の例:JZSP̶CF1G00-03-E) |
| (9) | 主回路電源はDC24V電源だけでなくDC48Vにも対応できます。制御回路電源はDC24Vです。 各種電源は別途お客様でご用意ください。 |
| 備考 |
|
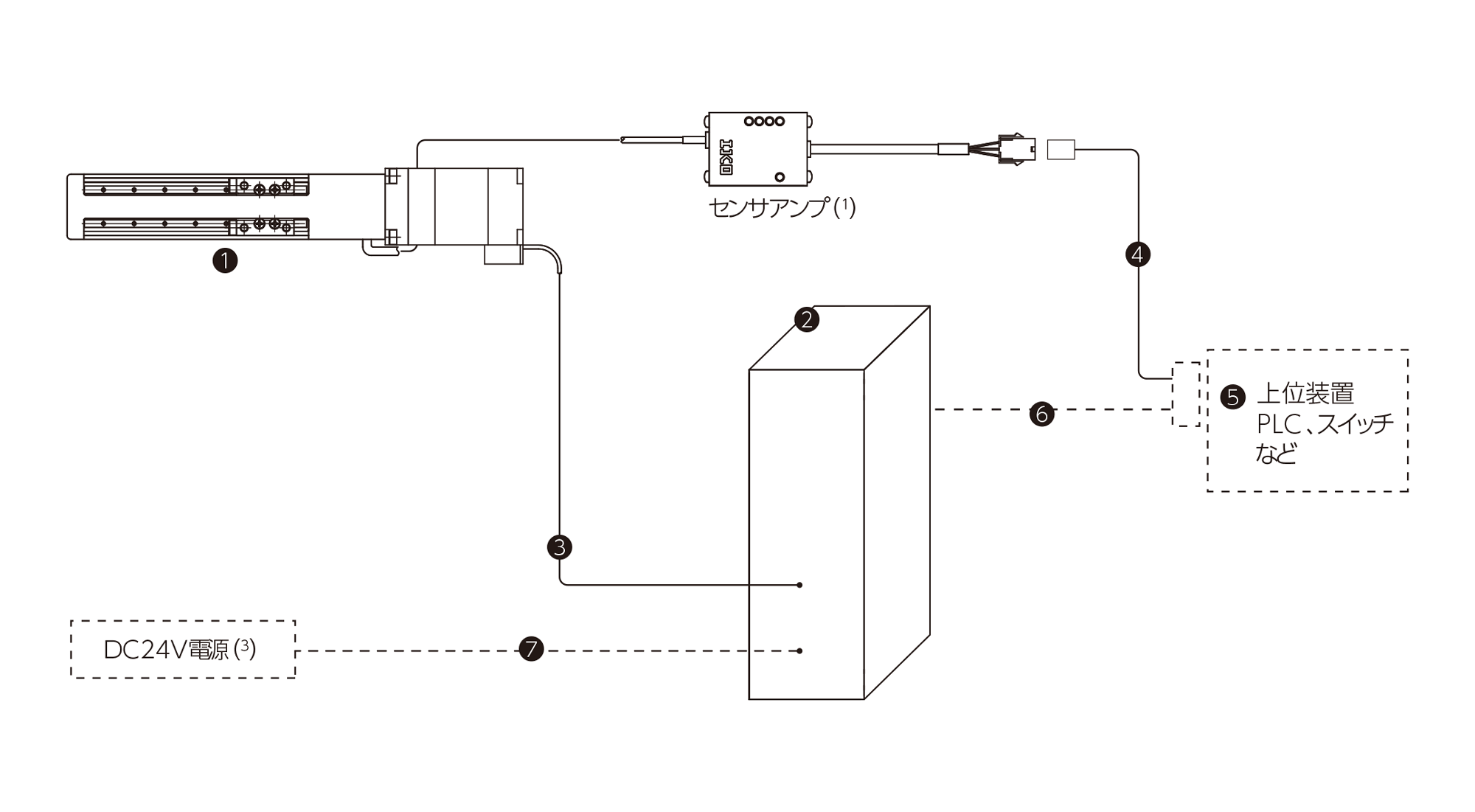
TM15 ステッピングモータ(V001)システム構成
*画像クリックで拡大表示できます
| No. | 名称 | 呼び番号 |
|---|---|---|
| ① | テーブル本体(モータ記号) | ステッピングモータ(5相) |
| ② | ドライバ(2) | CVD503-K |
| ③ | モータコード | TAE20R6-SM0□ (固定ケーブル仕様) |
| TAE20R7-SN0□(耐屈曲ケーブル仕様) | ||
| ④ | センサ中継コード(4)(5) | TAE10W0-LC03 |
| ⑤ | 上位装置 | お客様でご用意ください。 |
| ⑥ | I/Oコネクタ接続コード | お客様でご用意ください。(6)(7) |
| ⑦ | 電源コード | お客様でご用意ください。(6)(7) |
| 注(1) | センサなしを指定した場合、センサアンプは付属しません。 |
| (2) | オリエンタルモーター㈱製です。 |
| (3) | DC24V電源は別途お客様でご用意ください。 |
| (4) | 特殊なコード長さについては、IKOにお問い合わせください。 |
| (5) | コードの上位装置側は、ばら出しとなります。 |
| (6) | ドライバにコネクタが付属されています。製品カタログをご参照ください。 |
| (7) | コードを直接接続してください。 |
| 備考 |
モータコードの長さは、呼び番号末尾の□にて最大5mまで1m単位で指定します。 (5mの場合の例:TAE20R6-SM05) |
掲載されている製品以外にも、お客様のご要望に合わせた特別仕様品の開発もいたします。まずはお気軽にお問い合わせください。