
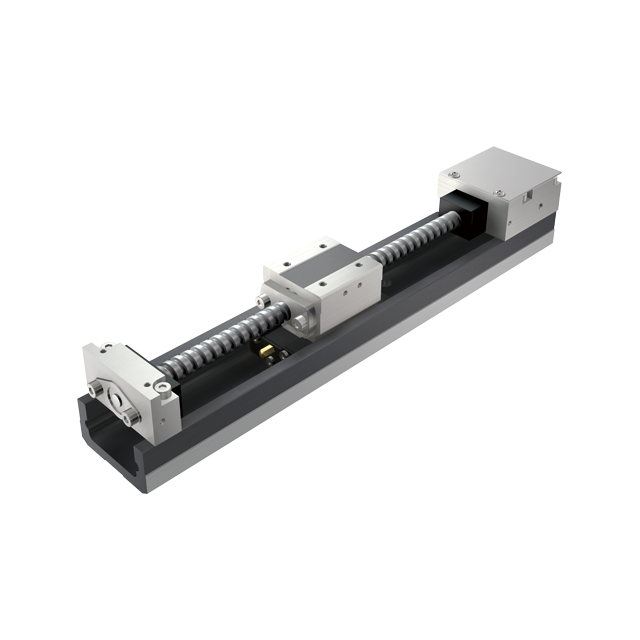


System coifiguration configuration
Dedicated drivers are available for the micro-precision positioning table TM, and the system configuration is shown below.Refer to the product catalog for driver specifications.When ordering, please specify each identification number separately.
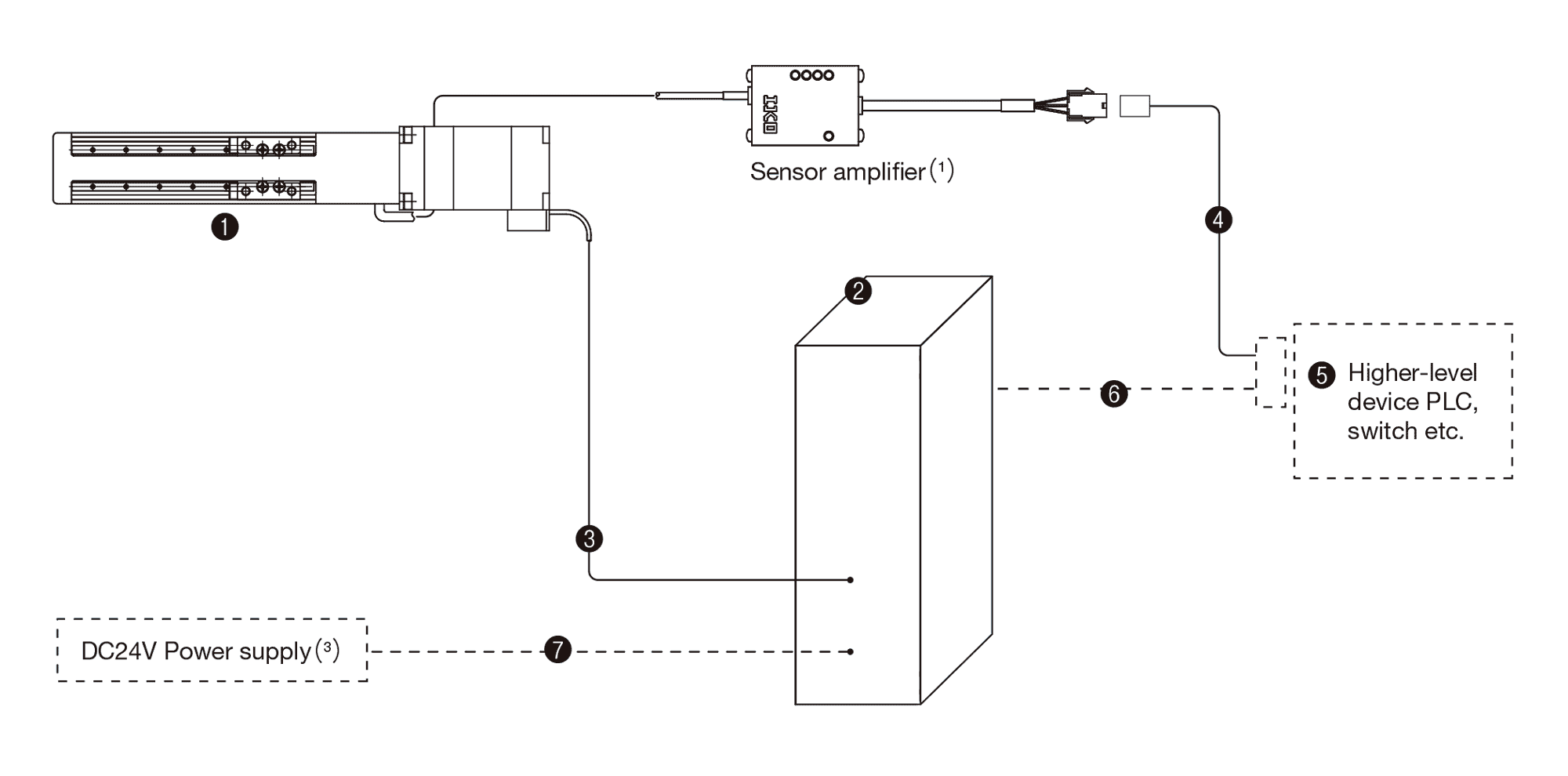
System Configuration for AC Servomotor (Y063, Y064)

*Click the image to enlarge it.
| No. | Name | Identification number | |
|---|---|---|---|
| ① | Table body (motor code) | Y063 AC Servomotor (standard type) |
Y064 AC Servomotor (high torque type) |
| ② | Driver(2) | SGDV-1R7EP1A | |
| ③ | Motor cord (3m)(2)(3) | JZSP-CF1M20-03-E | |
| ④ | Encoder cord (3m) (2)(3) |
JZSP-C7MP21-03-E | |
| ⑤ | Sensor extension cord (3m)(3)(4)(5) |
TAE10W0-LC03 | |
| ⑥ | I/O connector | TAE20W1-CN(6) | |
| ⑦ | Digital operator(2)(7) | JUSP-OP05A-1-E | |
| ⑧ | Digital operator extension cable(2)(7) |
JZSP-CF1S00-A3-E | |
| ⑨ | PC connection cable(2)(7) | JZSP-CVS06-02-E | |
| ⑩ | Power supply cable(2)(4)(8) | JZSP-CF1G00-□□-E | |
| ⑪ | Power supply(9) | This must be prepared by customer | |
| ⑫ | Higher-level device | ||
| ⑬ | I/O connector connection cable |
||
| Notes(1) | Once you select "Without sensor", a sensor amplifier will not be attached. |
| (2) | Manufactured by Yaskawa Electric Corporation. |
| (3) | For specific cord length, please contact IKO. |
| (4) | The higher-level device side of the cord will be loose. |
| (5) | If an origin signal is not required, do not use the origin sensor signal (ORG). |
| (6) | I/O connector TAE20W1-CN is a combined product of 10126-3000PE (connector) and 10326-52F0-008 (cover) from 3M Japan Limited. |
| (7) | A digital operator or ordinary PC is required for parameter setting. |
| (8) | Specify the length 1 - 3m in 1m increments in □□ of the identification number.( Example for 3m: JZSP-CF1G00-03-E) |
| (9) | The main circuit power supply supports DC48V as well as DC24V. The control circuit power supply is DC24V. Each power supply must be prepared separately by the customer |
| Remarks |
|
System Configuration for stepper motor(V001)
*Click the image to enlarge it.
| No. | Name | Identification number |
|---|---|---|
| ① | Table body (motor code) | Stepper motor (five phases) |
| ② | Driver(2) | CVD503-K |
| ③ | Motor cord | TAE20R6-SM0□ (Fixed cable specification) |
| TAE20R7-SN0□(Bending-resistant cable specification) | ||
| ④ | Sensor extension cord(4)(5) | TAE10W0-LC03 |
| ⑤ | Higher-level device | This must be prepared by customer |
| ⑥ | I/O connector connection cord |
This must be prepared by customer(6)(7) |
| ⑦ | Power cord | This must be prepared by customer(6)(7) |
| Notes(1) | Once you select "Without sensor", a sensor amplifier will not be attached. |
| (2) | Manufactured by Oriental Motor Co., Ltd. |
| (3) | DC24V power supply must be prepared separately by the customer. |
| (4) | For specific cord length, please contact IKO. |
| (5) | The higher-level device side of the cord will be loose. |
| (6) | Connectors are provided for the driver. Refer to the product catalog. |
| (7) | Connect the cord directly. |
| Remark |
The motor cord length can be specified using the box (□) at the end of the identification number, up to 5m in increments of 1m. (For 5m: TAE20R6-SM05) |
Some products are not shown in the catalogue. Also, modifications can be made to meet your requirements. Please do not hesitate to make inquiries.