



DDモータとは何か
DDモータは、減速機を使わず、必要なトルクと回転数を直接生み出す方式のモータです。中間機構を省くことで、高精度な位置決めと滑らかな動作が可能になります。従来は高速回転のモータを減速機で減速してトルクを得る方式が一般的でしたが、減速機を使わないDDモータは構造がシンプルで高性能です。
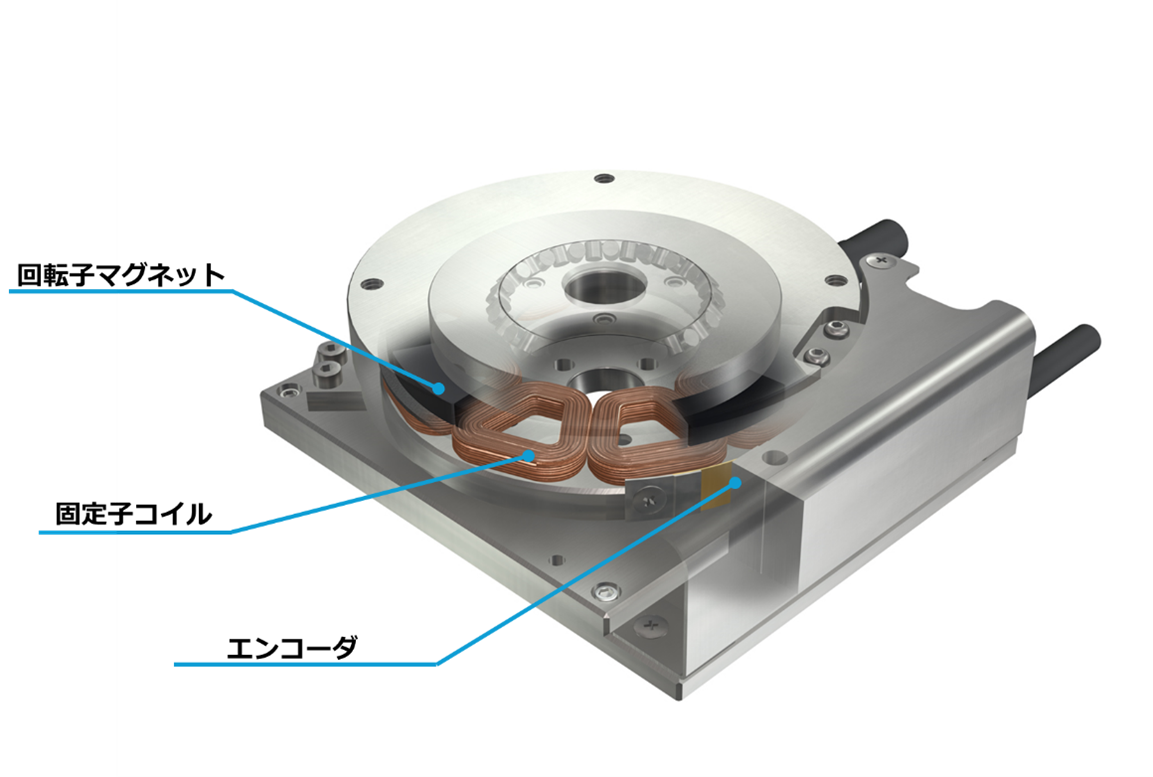
DDモータの基本構造
DDモータは、以下の主要な部品から構成されています。
- ステータ(固定子)
- 電磁石コイルを内蔵し、磁場を生成します。
- この磁場によってロータを回転させる役割を果たします。
- ロータ(回転子)
- 永久磁石が配置され、電磁誘導によって回転動作を行います。
- 必要なトルクと回転数を直接生み出します。
- エンコーダ
- ロータの位置情報をリアルタイムで検出します。
- 精密な位置決めや速度制御を可能にする重要な部品です。
- 制御回路
- エンコーダからの情報を基に、コイルへの電流を制御します。
- 高精度で滑らかな動作を実現するための要となるシステムです。
DDモータの動作原理
DDモータの基本動作のプロセスを以下に示します。
- 電磁誘導の原理
- コイルに電流を流すことで磁界を生成。
- 磁界がロータの永久磁石に吸引・反発を発生させる。
- エンコーダによる検出
- ロータの位置情報をリアルタイムで検出。
- 制御回路による電流制御
- エンコーダ情報を基に電流を調整し、正確な位置制御を実現。
DDモータと従来のモータとの差異
従来型モータとDDモータには構造と性能の面で明確な違いがあります。以下の表に主要な違いをまとめました。
| 従来型モータ | DDモータ | |
|---|---|---|
| 構造 | 減速機を介して駆動する複雑な構造 | 減速機なしのシンプルな構造 |
| 位置精度 | バックラッシが発生、精度が低下 | バックラッシなしで高精度動作 |
| 振動と静音 | ギア音や振動が発生する | 振動が少なく静粛性に優れる |
| 効率 | 機械的損失により効率が低下 | 高効率で発熱も少ない |
| 応答性 | 慣性が大きく応答が遅い | 高速応答性で動作変化に即対応 |
DDモータのメリットとデメリット
DDモータは、高精度で滑らかな動作を実現できる一方で、構造や制御の特性から注意すべき点も存在します。ここでは、DDモータを導入する際に知っておきたい主なメリットとデメリットを整理し、どのような場面で効果を発揮し、どのような点に配慮が必要なのかをわかりやすく解説します。
メリット
DDモータはその設計と性能により、多くのメリットを持っています:
- 高精度
- 減速機起因のバックラッシがないため、位置精度はミクロンレベルで制御可能。
- 静粛性
- 振動が少なく、ギア音が発生しないため静音環境に対応。
- 効率性
- 機械的損失が少ないため高効率で、発熱も抑えられます。
- メンテナンス性
- 摩耗部品は主に転がり軸受に限られるため、長期間にわたって安定稼働が可能。
デメリット
一方で、DDモータには以下のような課題もあります。
- 高コスト
- 精密な製造技術と高度な制御システムにより初期投資が高額になる。
- スペース要件
- 高トルクを得るためにはモータの径が大きくなり、設置スペースが制約となり得る。
- トルクリップルの発生
- トルクのムラが発生する可能性があり、特に低速時の精密制御では対策が必要。
DDモータの正しい使用方法
DDモータを正しく使用するためには、その特性に合わせた操作方法や設定手順を理解する必要があります。DDモータは高精度で滑らかな動作が得られる一方、適切な使い方を守らなければ性能を十分に発揮できない場合があります。本章では、DDモータの基本的な使用方法と、運用時に押さえておくべきポイントをわかりやすく解説します。
設置時の注意点と手順
DDモータを安定して運用するには、正しい設置が重要です。以下に主な手順を示します。
- ①設置前に、設置面の平坦性・剛性、周囲環境、電源条件、配線計画を確認します。
- ②設置時は、剛性の高い土台を用い、防振材やレベル調整を行い、モータを適切な締付トルクで固定して軸芯を正確に合わせます。
- ③電気配線では、電源の極性確認、エンコーダケーブルの適切な配線、シールドケーブルやアースの確実な接続、サーマルプロテクタや過電流保護、非常停止などの保護装置も適切に設定します。
- ④無負荷で低速回転させ、異音・振動・エンコーダ信号を確認して初期動作をチェックします。
過負荷を避けるための使用法
DDモータの寿命を延ばすには、過負荷を避けることが最も重要です。連続運転では定格トルクの80%以内を目安とし、ピークトルクも許容範囲に収めます。急激な加減速は行わず、滑らかな速度プロファイル(速度の変化をあらかじめ設計した動作パターン)やS字加速(加速度そのものを滑らかに変化させる加速方式)を使って負担を減らします。デューティサイクル(運転時間と休止時間の比率)にも注意し、高負荷運転後は休止時間を確保します。負荷状態はトルクセンサや電流値で監視し、異常時には自動停止機能を活用します。また、周囲温度が高い場合は負荷を下げ、換気や冷却を強化します。粉塵や湿気の多い環境では、適切な保護等級のモータを選ぶことが望まれます。
動作確認と定期的なチェックの重要性
DDモータの性能維持には、定期的な点検が重要です。日常点検では、異音・振動、表面温度、ケーブルの緩み、警告表示を確認します。月次点検では、電気配線の締結や劣化、絶縁抵抗、取付部やベアリングの状態、位置決め精度やエンコーダ信号など動作性能をチェックします。年次点検では、専門業者による総合診断や絶縁測定、エンコーダ校正、制御パラメータの見直しを行います。点検結果を記録し経年変化を把握することで、異常を早期に発見し、故障を未然に防ぐことができます。
DDモータ使用時の注意点
DDモータは高精度で滑らかな動作が得られる一方、その性能を十分に引き出すためには、特有の注意点を理解しておく必要があります。誤った取り扱いや設定は、振動の増大や発熱、装置全体のトラブルにつながることがあります。本章では、DDモータを安全かつ安定して運用するために押さえておくべき主な注意点を、わかりやすく整理して解説します。
過電流による故障の防止法
DDモータでは過電流が故障原因として多く、負荷の急変や衝突、設定トルク超過、制御パラメータ不良、電源変動、モータのロックなどが主な要因です。対策としては、電流リミッタやサーキットブレーカ、非常停止ボタンなどの保護装置を適切に設定し、トルクリミット・加速度制限・ソフトスタートなど制御面の調整を行います。運用面では負荷衝突の防止、安全教育、負荷状態の定期監視が重要です。設計段階では余裕のあるモータ容量や電源容量を確保し、サージ保護回路を組み込みます。また、電流値を常時監視し、トレンドを記録することで異常を早期に発見できます。急激な電流上昇があれば、速やかに原因を特定して対策を行うことが必要です。
温度管理とモータの耐熱性について
DDモータは温度上昇に弱く、性能と寿命は動作温度に大きく左右されます。発熱は銅損・鉄損・摩擦、高負荷運転、周囲温度の高さ、冷却不足などによって増大します。銅損とは導体(銅)の抵抗によって生じる電力損失、鉄損とは磁性材料であるコア(鉄)の物性によって発生する損失です。上記より、許容温度や磁石の減磁温度を把握し、自然空冷・強制空冷・水冷など適切な冷却方法を選ぶことが重要です。サーミスタによる温度監視や過熱時の自動停止も有効です。
振動が影響を与えるケース
DDモータは高精度な反面、振動に弱く、放置すると位置決め精度の低下や制御不安定、機械的損傷につながります。振動の原因は、外部振動、モータ内部のトルクリップル、不均衡な負荷、取付剛性不足などが考えられます。対策としては、剛性の高い設置台や防振材の使用、取付精度の確保、適切なカップリングの選定が有効です。制御面ではノッチフィルタやゲイン調整などで振動を抑えます。

DDモータの使用分野
DDモータは、高精度な位置決めや滑らかな動作が求められる装置で広く利用されています。減速機を使わない構造により、応答性の高さや静粛性が活かせるため、ロボット、半導体製造装置、工作機械、医療機器など、さまざまな分野で採用が進んでいます。本章では、DDモータがどのような用途で活用されているのか、その代表的な使用分野をわかりやすく紹介します。
半導体製造装置
DDモータは、半導体製造装置の精密な位置決めや高速な動作制御において、その特性を最大限に発揮します。減速機を使用せず直接駆動する構造により、バックラッシが完全に排除され、高精度且つ滑らかな動作が求められるアライメント工程や露光装置に最適です。また、動摩擦が少ない構造により高速応答性を実現し、タクトタイム短縮に寄与します。さらに、DDモータの静粛性とメンテナンスフリーな特性は、半導体製造現場の高まる要求に応えるソリューションを提供します。加えて、減速機不要のため、クリーンルーム環境でも発塵・汚染リスクの低減に貢献します。
医療機器
医療機器では、DDモータの高精度な動作と静粛性が評価され、手術支援ロボット、診断装置(CT・MRI)、放射線治療装置、リハビリ機器など幅広い用途に採用されています。減速機を使用しない構造によりバックラッシが排除され、滑らかな動作を必要とする医療用途に対応可能です。さらに清潔性が重要な医療環境に適した設計が行われており、安全規格(IEC 60601など)の適合も可能です。医療機器におけるDDモータの重要性は、センサー精度と動作の安定性が求められる医療や介護ロボットの需要増加とともに、今後ますます高まると予測されます。
IKO製品
当社製品にはリニアモータ駆動のダイレクトドライブ方式を採用した製品があります。ここではその製品についてご紹介いたします。
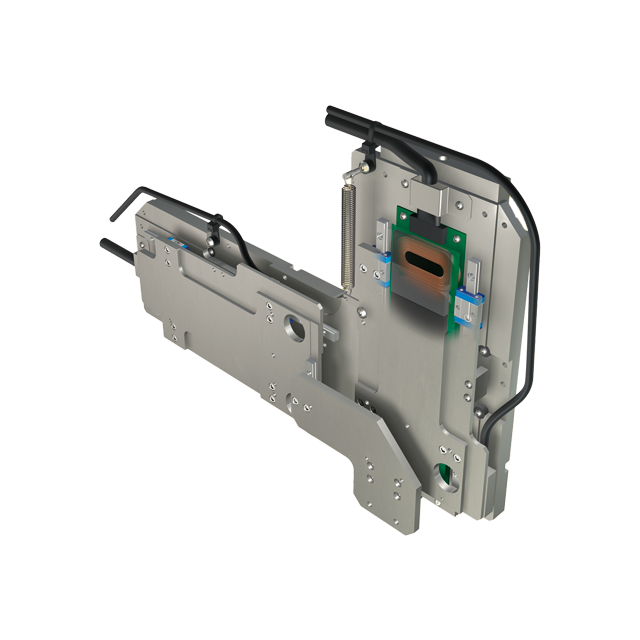
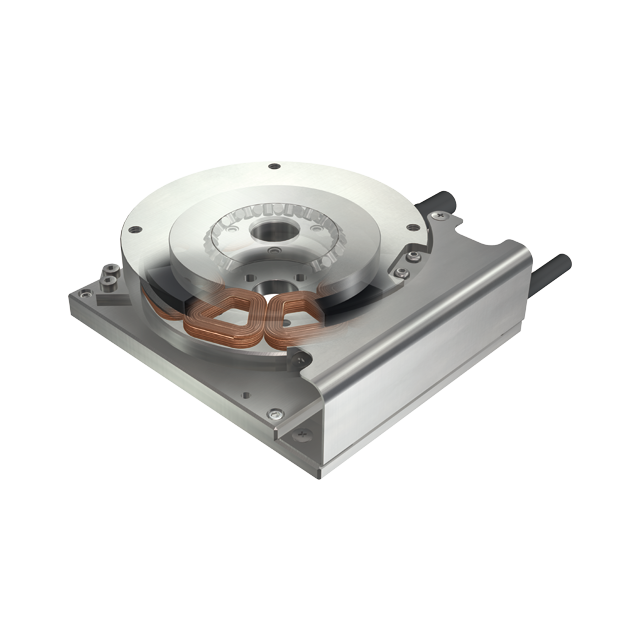
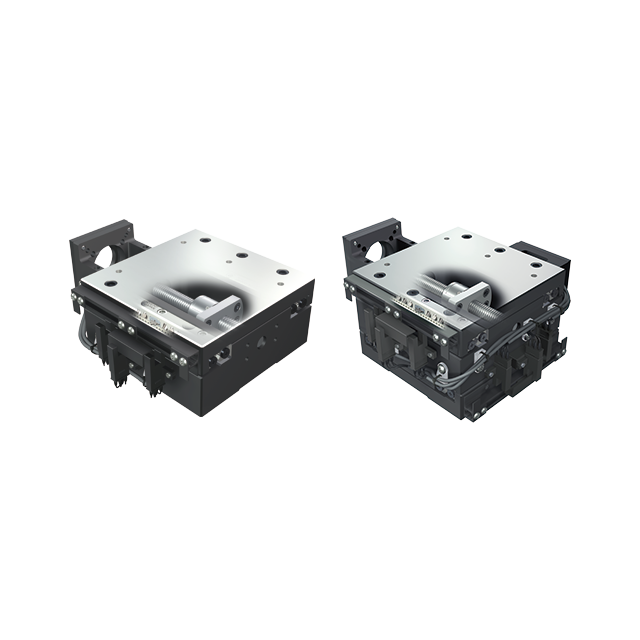
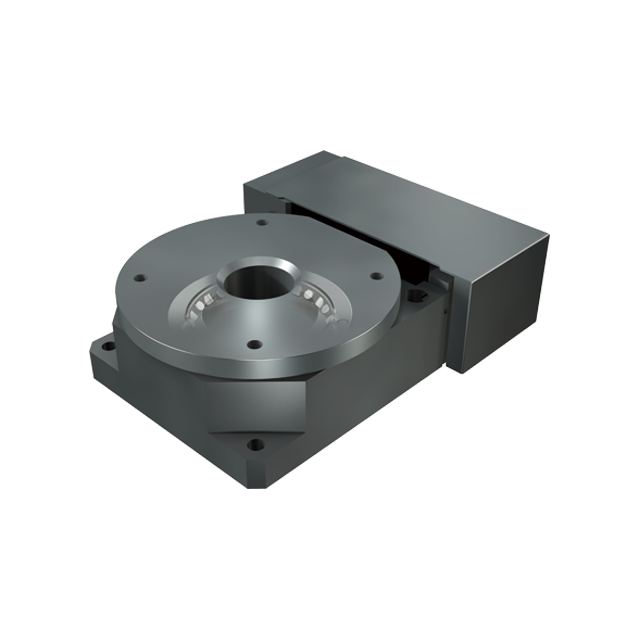
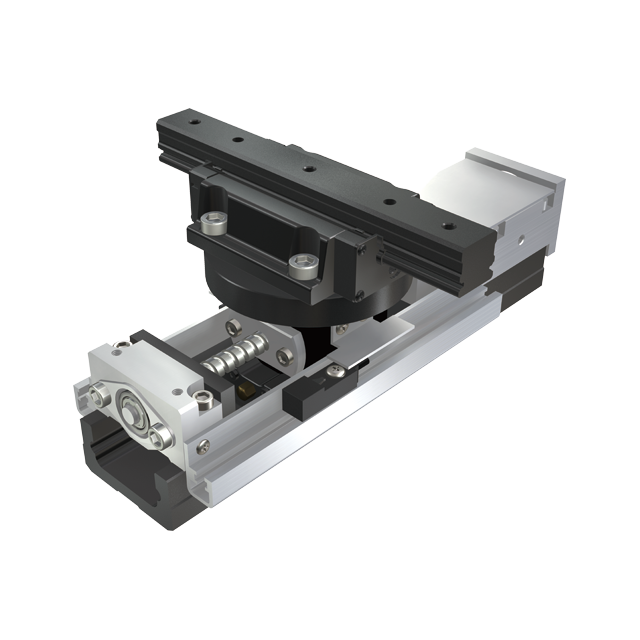
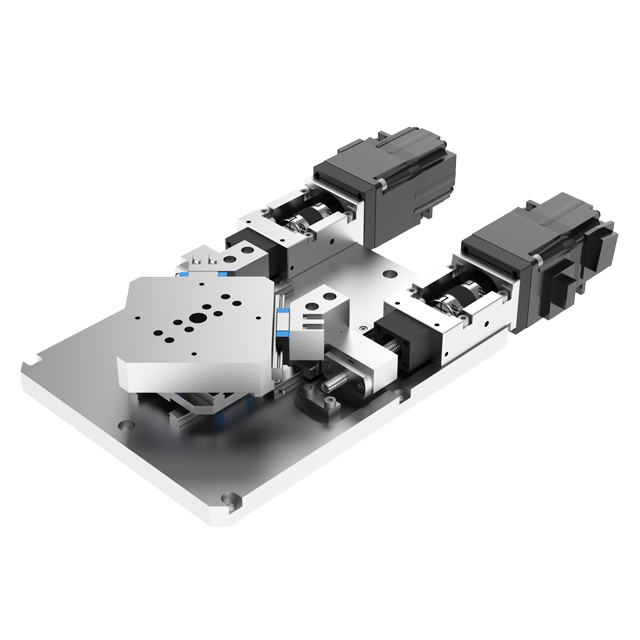
アライメントステージSA
アライメントステージSA・・・DEは、直線案内部の直動案内機器と回転案内部のクロスローラベアリングをリニアモータで直接駆動(ダイレクトドライブ方式)させることで、低断面でコンパクトなXYΘ運動を実現するアライメントステージです。また、高分解能リニアスケールの採用とフルクローズドループ制御により、バックラッシのない高精度な位置決め動作を実現しています。半導体・液晶関連製造装置など、画像処理を利用したアライメント処理やクリーンな環境を要求される測定器や検査装置などの位置決め機構として最適です。

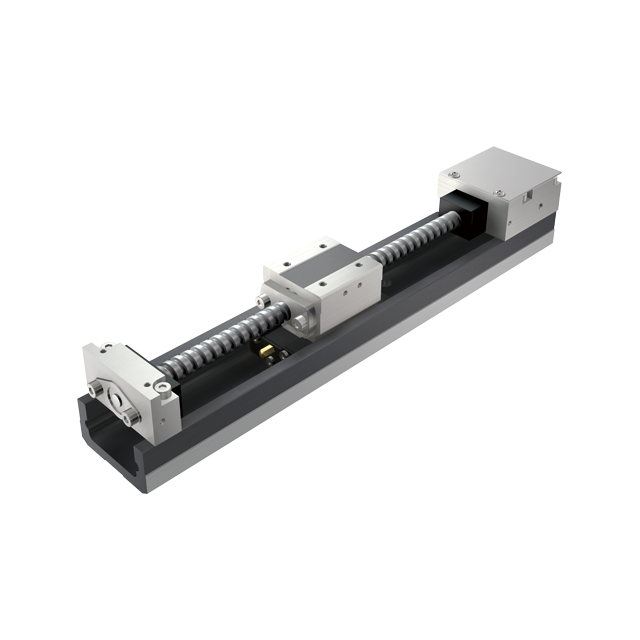
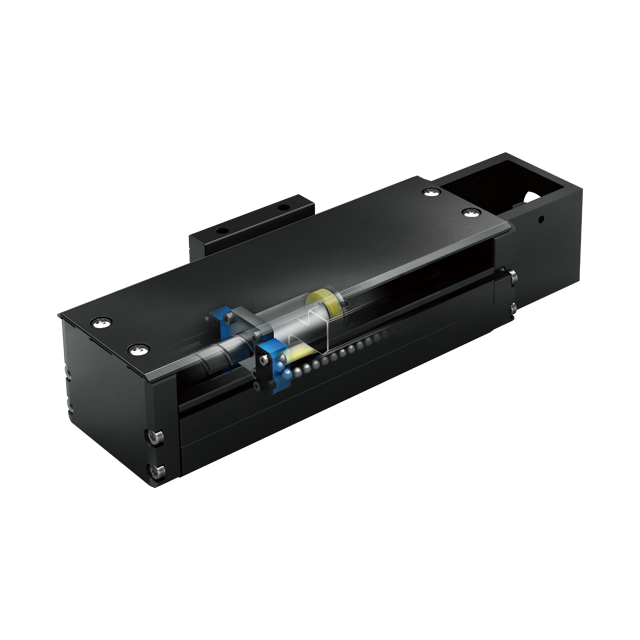
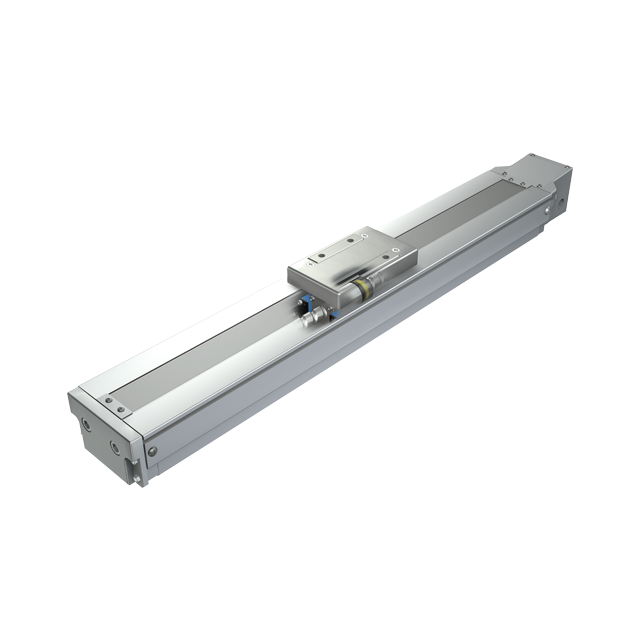
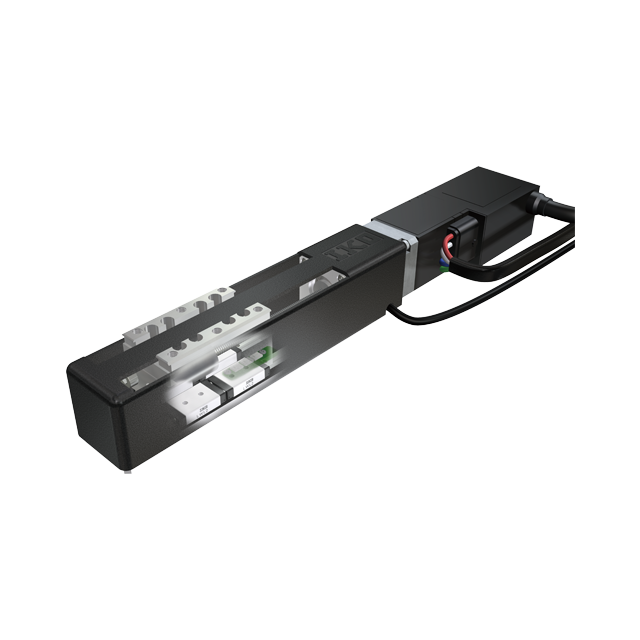
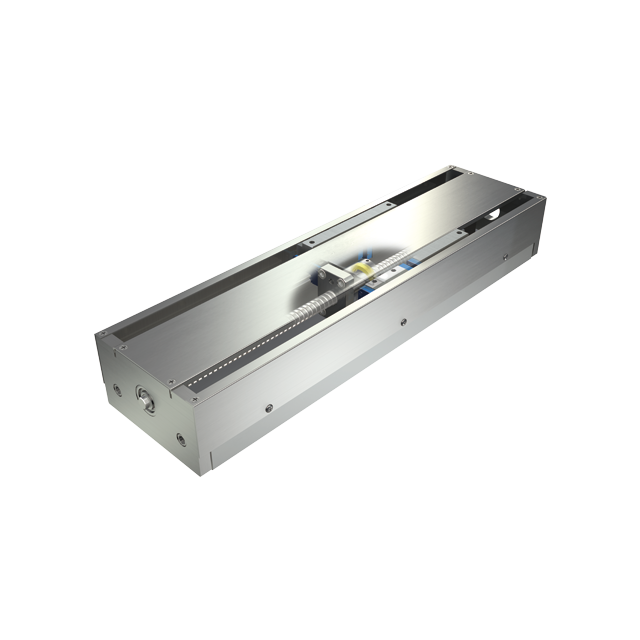
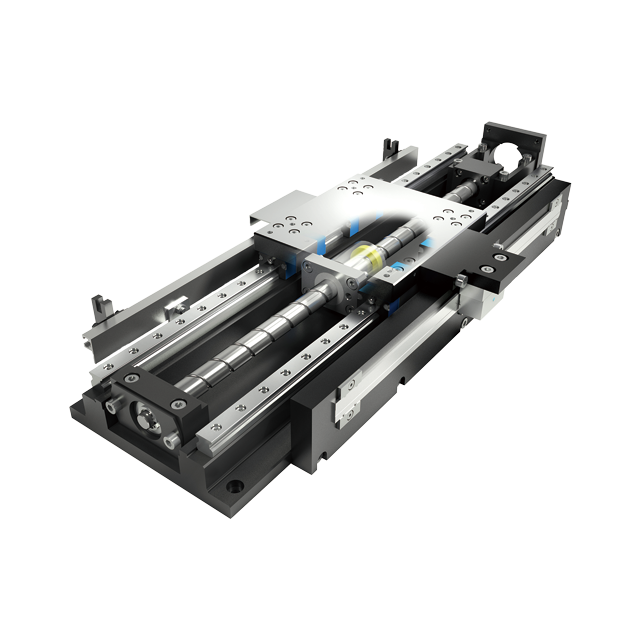
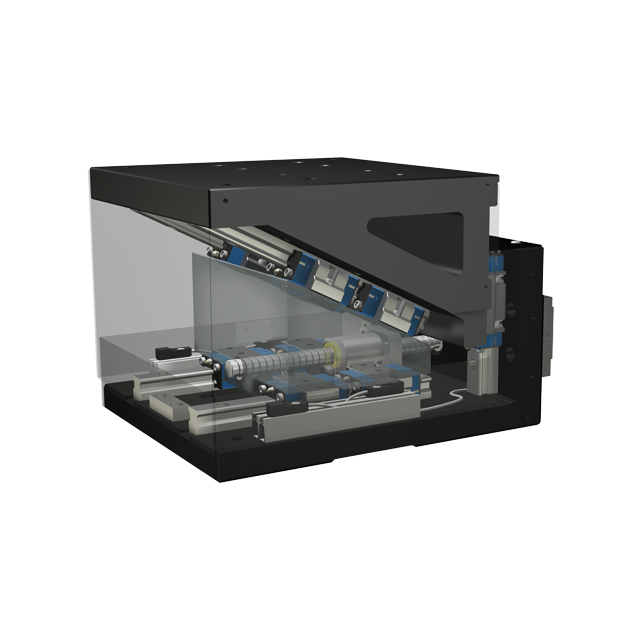
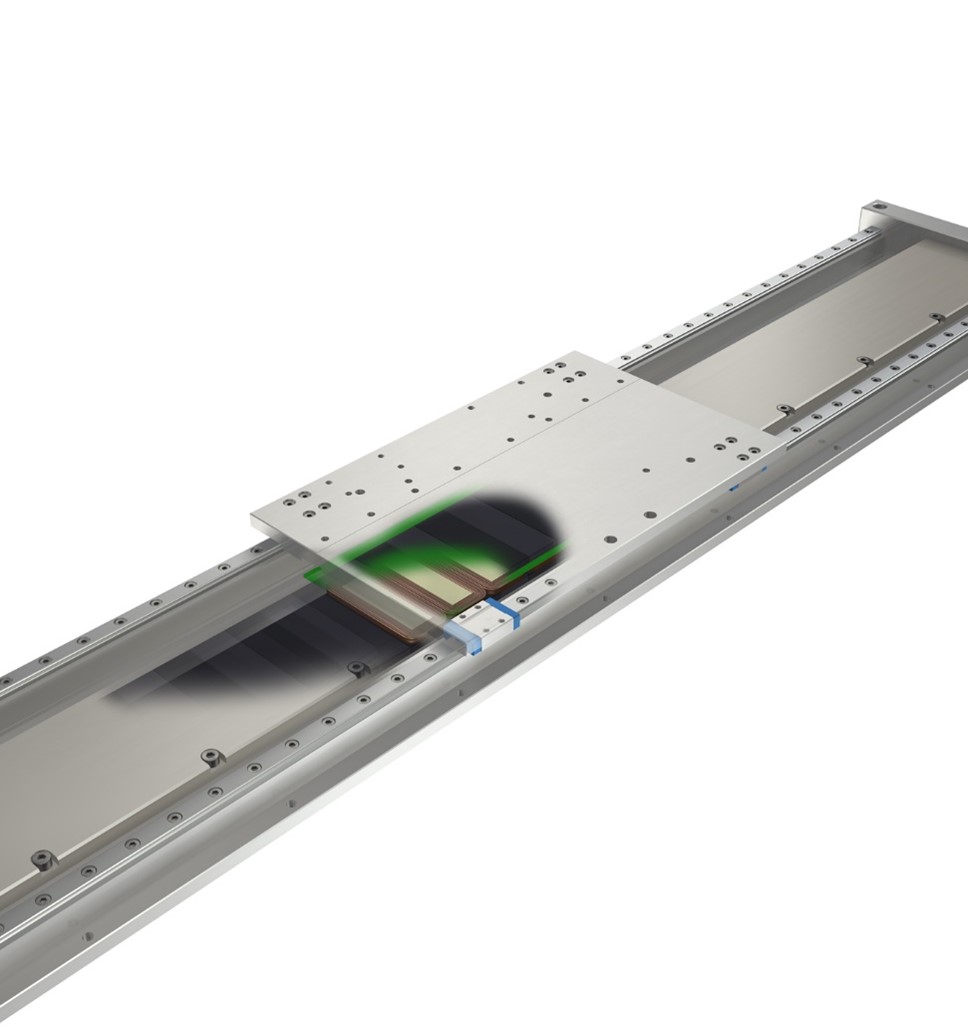
リニアモータテーブルLT
アルミニウム合金製の可動テーブルをリニアモータで直接駆動させるダイレクトドライブ方式を採用し、光学式リニアエンコーダを内蔵したコンパクトで高精度な位置決めテーブルです。軽量な可動テーブルと大きな推力により、高加減速・高応答な動作を可能とします。リニアモータテーブルLTは、半導体・液晶関連装置や、高速での作業を要求される測定器・組立機及び搬送機などの用途に最適です。
まとめ
DDモータは減速機を介さず必要なトルクと回転数で直接駆動できるため、高精度・静粛・高効率で、メンテナンス性にも優れています。初期コストやトルクリップルの課題はあるものの、産業用ロボットや医療機器など高精度が求められる分野で大きな効果を発揮します。使用時は、正確な設置、過負荷を避けた運用、定期点検、そして過電流・温度・振動対策が重要です。導入する際は、用途に合ったモータ選定や専門家による設計・設置、制御システムとの相性、サポート体制を確認することが成功につながります。DDモータは小型化・高性能化が進んでおり、今後も幅広い分野で活用が拡大すると期待されています。
関連製品
本記事に関するIKOメカトロ製品の一部を以下に掲載しています。製品の詳細につきましては弊社までお問い合わせください。