


推力
推力は、機械工学やエンジニアリングにおいて重要な力の一つです。航空機や自動車、機械産業など、多くの分野でその理解は欠かせません。ここでは、推力の基本をわかりやすく解説していきます。
推力の概要
推力とは、物体を特定の方向へ押し進める力の総称であり、その発生原理は分野によって異なります。航空分野では、流体を後方へ押し出すことで生じる反作用の力として理解されており、ジェットエンジンやロケットの推進力がその典型的な例です。一方、機械工学では、モータのトルクをボールねじで直線運動に変換して得られる力や、油圧シリンダがピストンに作用させる軸方向の力など、流体の反作用を伴わない機構的な直線方向の力も推力として扱われます。
このように推力は、流体力学的な現象から機械的な直線運動まで幅広い場面で用いられる概念であり、対象となるシステムの構造や作用原理に応じてその意味合いが変化します。推力を正しく理解するためには、反作用による力だけでなく、機械がどのように力を生成し伝達しているかという視点も重要です。
身近な推力
推力という概念は一見すると専門的に感じられますが、その原理自体は日常生活の中にも広く見られます。たとえば、扇風機は羽根が空気を前方へ押し出すことで送風を行い、その反作用として本体には後方向の推力が生じます。また、風船から空気が勢いよく噴き出すと風船が反対方向へ動く現象も、推力の基本原理を示す身近な例です。このように、「流体や物体を一方向へ押し出すことで、その反作用として得られる力」も推力の一種であり、特定の分野に限らず普遍的に成立する物理原理であることが分かります。
機械工学での推力
機械工学において推力とは、物体を特定の方向へ進ませる力の総称です。一方、直動機構の分野では、モータの回転力や電磁力を直線運動に変換して得られる直線方向の力を慣用的に「推力」と呼び、性能指標の中心となります。ここでは、代表的な直動機構であるボールねじとリニアモータを取り上げ、それぞれの推力発生原理と特性を解説します。
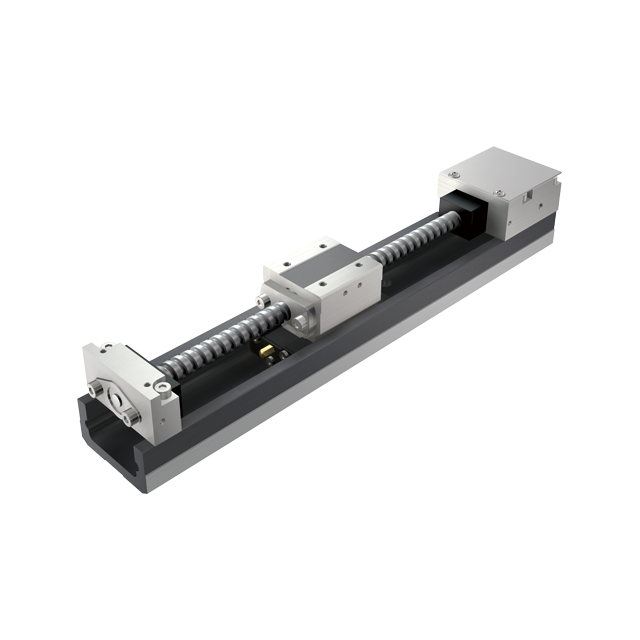
ボールねじ
ボールねじは、機械産業の分野で最も広く使われている直動機構のひとつです。モータの回転運動を高効率に直線運動へ変換できるため、精密位置決めや高推力が求められる場面で多く採用されています。その特長は、ねじ軸とナットの間に多数の鋼球が配置され、転がり摩擦によって高い効率で力を伝達できる点にあります。摩擦損失が小さいため、比較的小さなトルクで大きな推力を得ることができます。
リニアモータ
リニアモータは、ボールねじなどの回転機構を介さずに電磁力で直接推力を発生させることができます。高速性や応答性に優れることから、近年では半導体装置や高速搬送システムなどで採用が拡大しています。一般的なリニアモータは、固定子(ステータ)側、可動子(ムーバ)側にマグネット及びコイルのいずれか一方ずつを組み合わせた構造を持ちます。コイルに電流を流すと磁場が発生し、マグネットとの相互作用で直線方向の力が生じます。このとき制御する電流波形により進行方向や速度、加速度も自在に制御可能です。回転機構を介さずに直線運動を得られるため、機械的な摩擦が少なく、高応答・高速度を実現できる点が特長です。
推力に影響する要素
ボールねじやリニアモータを使用する際には共通して、物理的に運用が可能であるかを計算によって導き出す必要があります。ボールねじ駆動でもリニアモータ駆動でも、推力計算の考え方は共通しており、特に重要な要素として「負荷と抵抗」「加速と時間」「実効トルク(推力)と定格トルク(推力)」の3つのテーマで解説します。
負荷と抵抗
推力を計算する際には、まず「動かす対象の負荷」と「動きを妨げる抵抗」を丁寧に把握することが大切です。位置決めテーブルにはワークや治具、センサ類などさまざまな部品が搭載されますが、これらの質量は単に足し合わせればよいというわけではありません。重心の位置や取り付け方によってガイドにかかる負荷の分布が変わるため、摩擦抵抗に影響を与えます。ボールねじ駆動の場合は、ねじとナットの転がり摩擦やガイドの摩擦が主な抵抗になります。一方、リニアモータ駆動では駆動部に摩擦がほとんどないため、ガイドの摩擦が主な抵抗となります。
さらに、推力計算で欠かせないのが「慣性(イナーシャ)」です。慣性とは、物体が止まっていれば止まり続けようとする、動いていればそのまま動き続けようとする性質のことです。これにより、一定の速度で運動している物体が速度を変えるときには質量に応じた推力が必要です。特にボールねじ駆動では、負荷質量だけでなく、ねじ軸が回転することによる慣性も推力に影響するため、モータやボールねじの回転に関する慣性を計算に組み込む必要があります。リニアモータでは回転部分がないため、計算としては比較的シンプルです。このように、負荷と抵抗を正しく把握することは推力計算の基本であり、ここでの見積もりが不正確だと、その後の計算にも大きく影響してしまいます。
加速と時間
位置決めテーブルは、指令を受けた瞬間に目標速度へ到達するわけではなく、必ず加速区間を経て目標速度に達します。この加速区間でどれだけの加速度を与えられるかが、必要な推力を計算するうえで大きく影響します。位置決めテーブルが駆動するときに必要な推力は、加速時に最も大きくなります。この加速に必要な推力は、モータのトルク(推力)に依存するため、限界加速時間の計算が必要です。
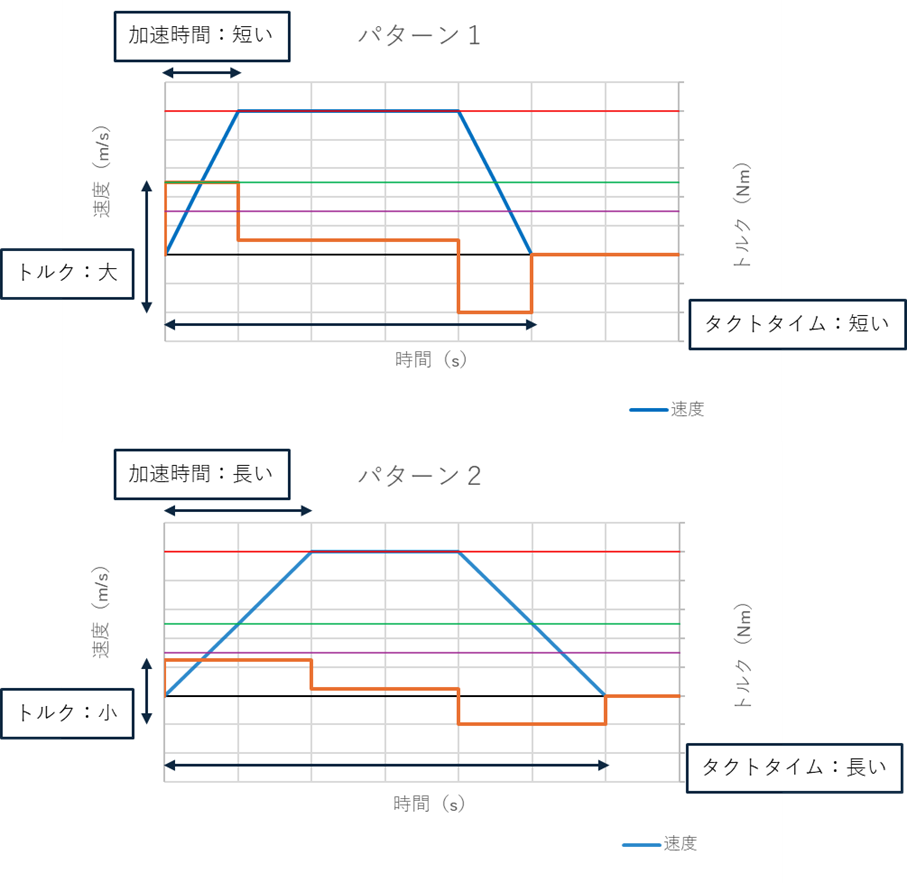
生産設備ではサイクルタイムの短縮が求められることが多く、加速時間をできるだけ短くしたいという要望が生じます。しかし、加速時間を短くすると必要推力が増え、モータや電源の容量も大きくなってしまいます。サイクルタイムと推力のバランスをどこで取るかは、設計上の重要な判断ポイントになります。そのため推力を計算する際には、あらかじめ採用する加減速パターンを前提条件として設定し、それに基づいて必要推力を算出・評価することが望まれます。
具体例として、ボールねじ駆動の位置決めテーブルが、直線運動で同じ距離を走る状況を想定します。目標速度V、使用モータの定格トルクT(使用時の推奨値)及び最大トルクT0(短時間であれば使用できる最大値)は共通で、パターン2の加減速度はパターン1の2倍大きいです。このため、パターン2はパターン1よりも目標速度に到達するのが速く、長く目標速度を維持しており、より早く運動を完了しています。しかし、パターン2は加速度が大きいため、必要なトルクがパターン1より多く、モータの定格トルクTより大きくなっており、最大トルクT0と同程度の値となっています。この場合、最もトルクがかかる時間は数秒程度と比較的短いですが、繰り返しこのパターンで継続使用することでモータに過度な負荷がかかり、早期に破損してしまう可能性があります。そのため設計時には、目標速度V、モータの定格トルクT及び最大トルクT0を含めた運転パターンを考慮し、目標速度Vに安全に到達できる実効トルクと加速限界時間を算出することが重要です。
実効トルク(推力)と定格トルク(推力)
トルク(推力)計算で求めた「実効トルク(推力)」及び「限界加速時間」は、最終的にモータの仕様と照らし合わせて、安全に運転できる範囲に収まっているかを確認する必要があります。前項でも触れましたがモータには、連続的に出力できる「定格トルク(推力)」と、短時間だけ許容される「最大トルク(推力)」が設定されています。計算した「実効トルク(推力)」が「定格トルク(推力)」を超えてしまうと、モータの過熱や焼付き、位置決め精度の悪化に繋がることがあります。そのため、「実効トルク(推力)」がモータの「定格トルク(推力)」よりも小さいことを確認する必要があります。
上記のように、位置決めテーブルに使用されるモータの選定には緻密な計算が必要です。この計算をサポートするため、トルク(推力)を計算できる寿命計算ツールを当Webサイト上で公開していますので、ぜひご活用ください。

IKOメカトロ製品(精密位置決めテーブル)のご紹介
ここではIKOメカトロシリーズの中から、リニアモータ駆動の精密位置決めテーブルをご紹介します。
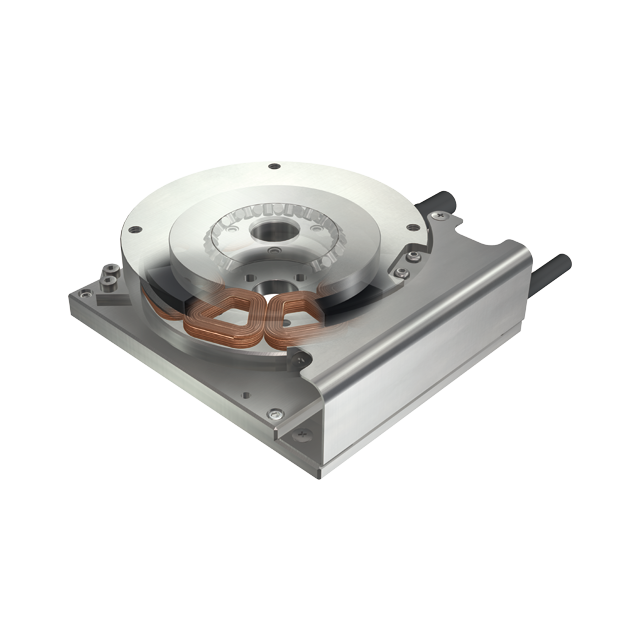
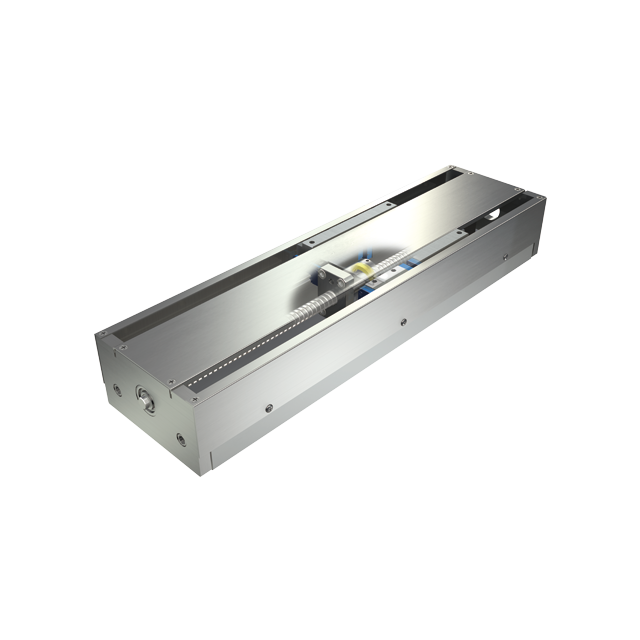
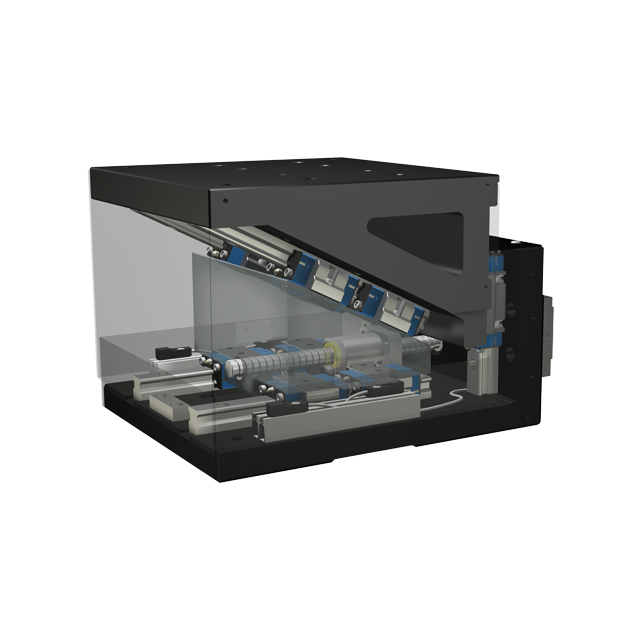
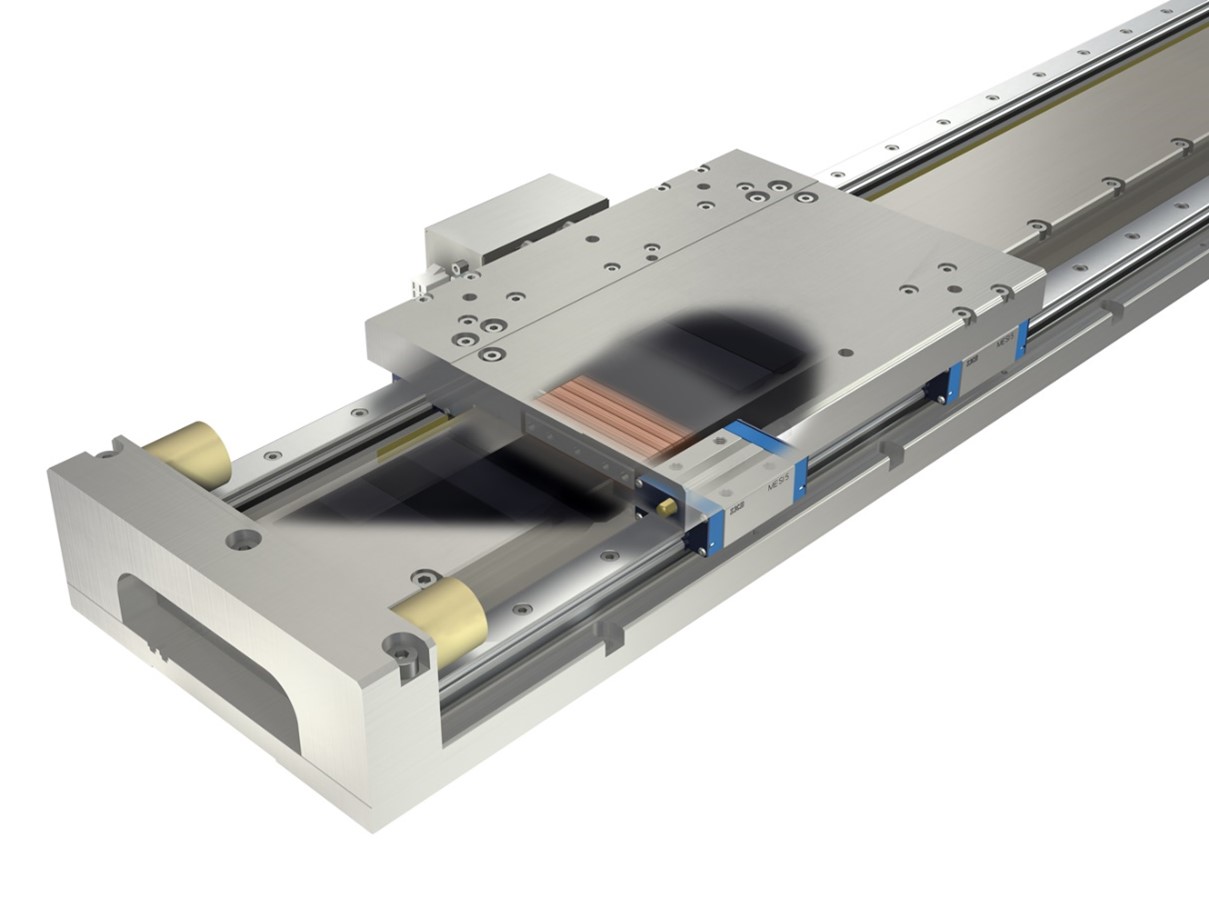
リニアモータテーブルLT
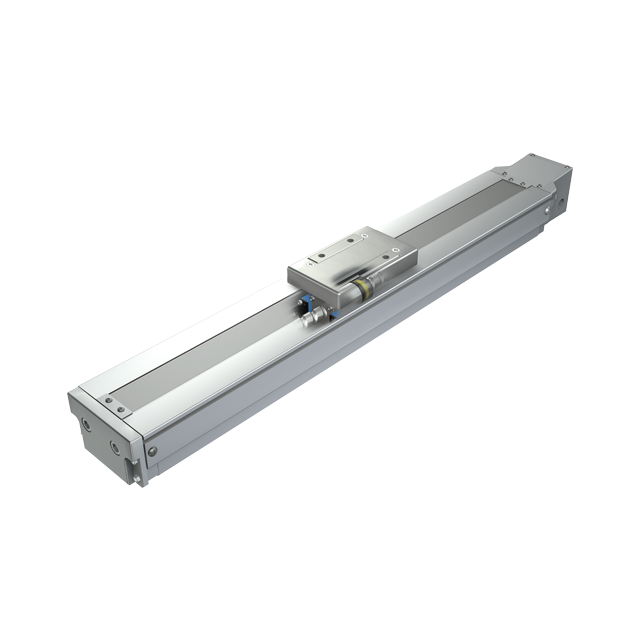
リニアモータテーブルLTは、アルミニウム合金製の可動テーブルとベッドの間にACリニアサーボモータを組み込み、光学式リニアエンコーダを内蔵したことで、断面高さが最大サイズで80㎜と非常にコンパクトでありながら、±0.5~1.0μmという高精度な繰返し位置決め精度を実現した製品です。
コンパクトシリーズのLT…CE、ロングストロークシリーズのLT…LD及びハイスラストシリーズのLT…Hの3つのシリーズを用意しており、用途に合わせて選択できます。
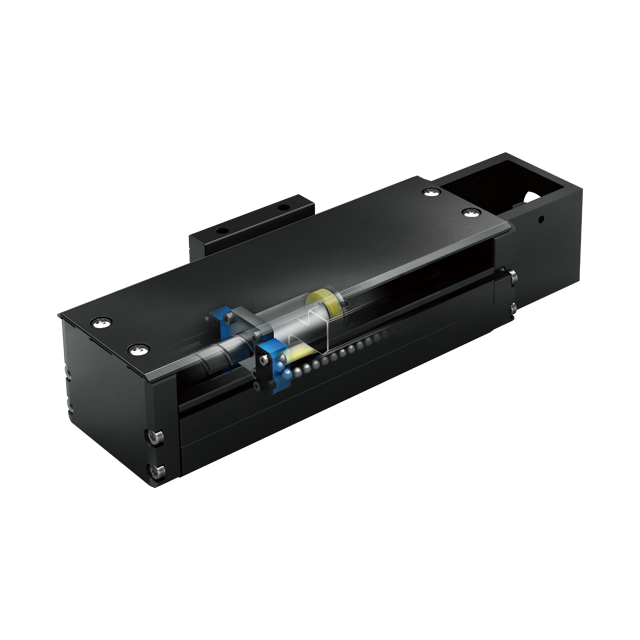
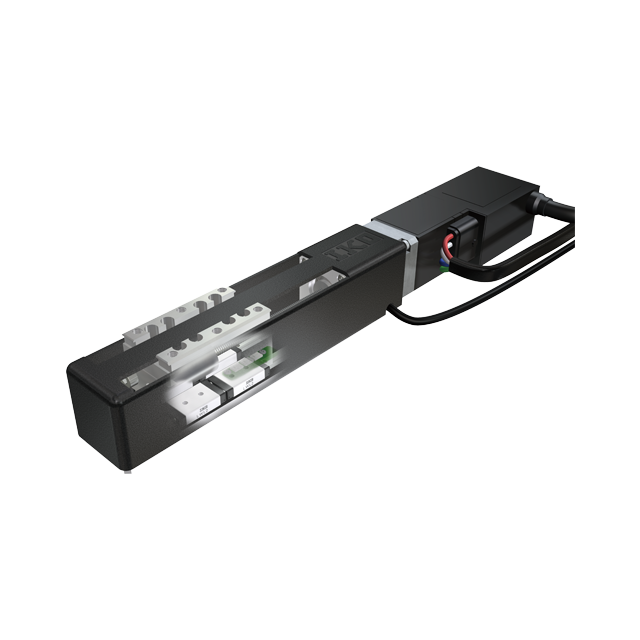
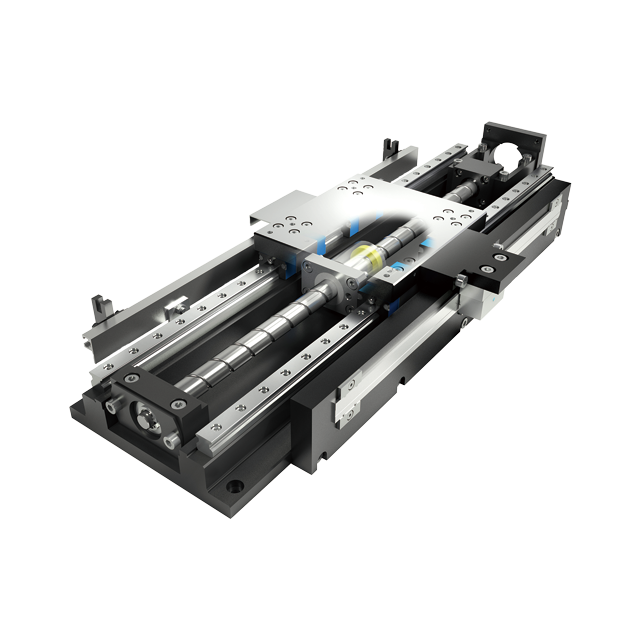
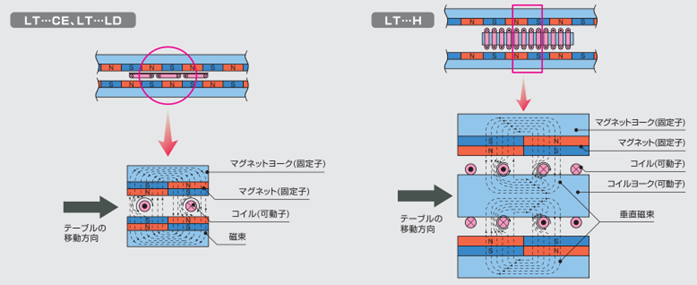
特にハイスラストシリーズのLT…Hは、軽量な可動テーブルと大きな推力により、高加減速・高応答な動作を可能とします。LT…CEやLT…LD(下図左側)は、テーブルに取り付けられたコイルをマグネットヨーク(磁束を効率よく通す部品)及びマグネットで挟み込み、磁束の流れを作り横方向の推力を得ています。LT…H(下図右側)は、基本的な内部構造は同じですが、上下対になった固定子側のマグネットによって発生している磁束の中で、可動子側のコイルを通常よりも高密度で配置することで、他のシリーズより有効な磁束が増え、大きな推力を発揮できます。
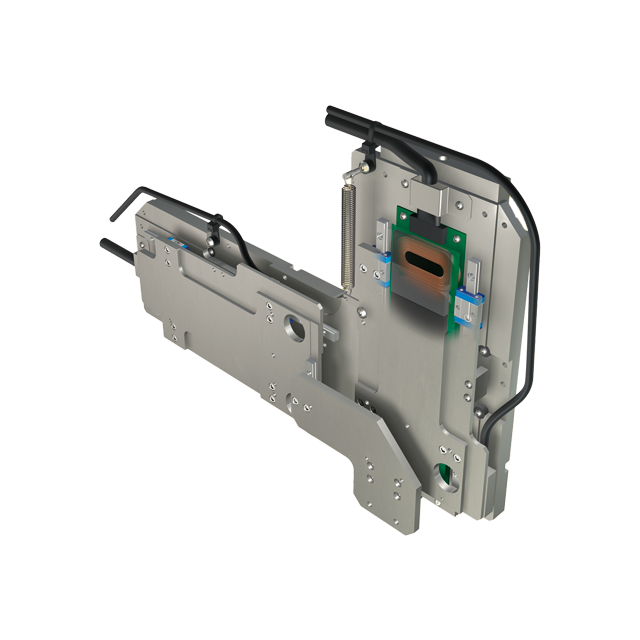
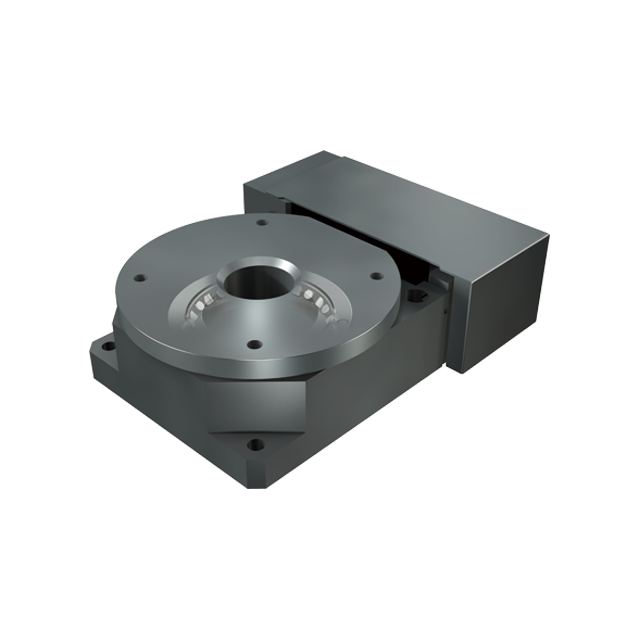
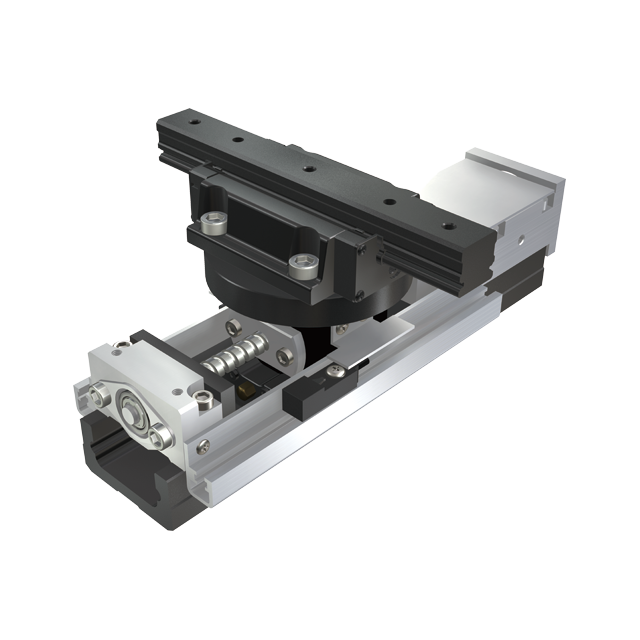
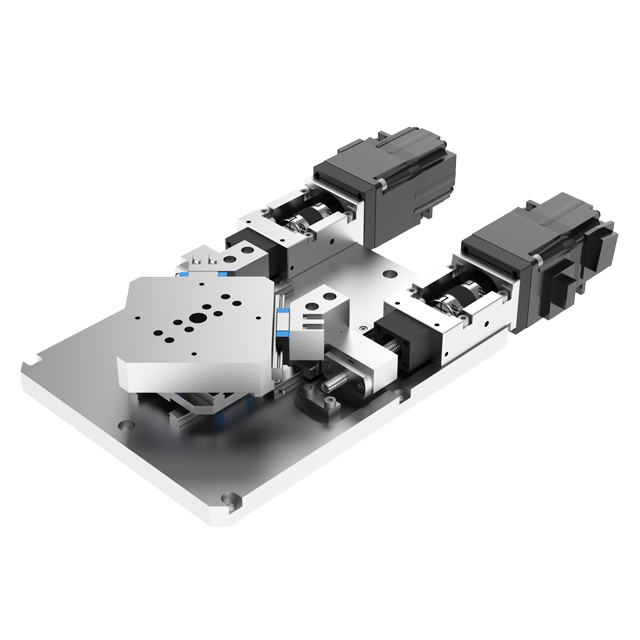
ナノリニアNT…XZH
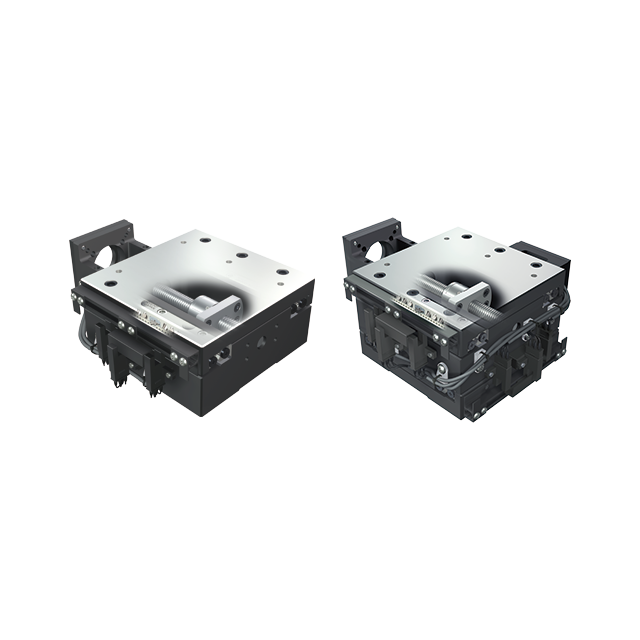
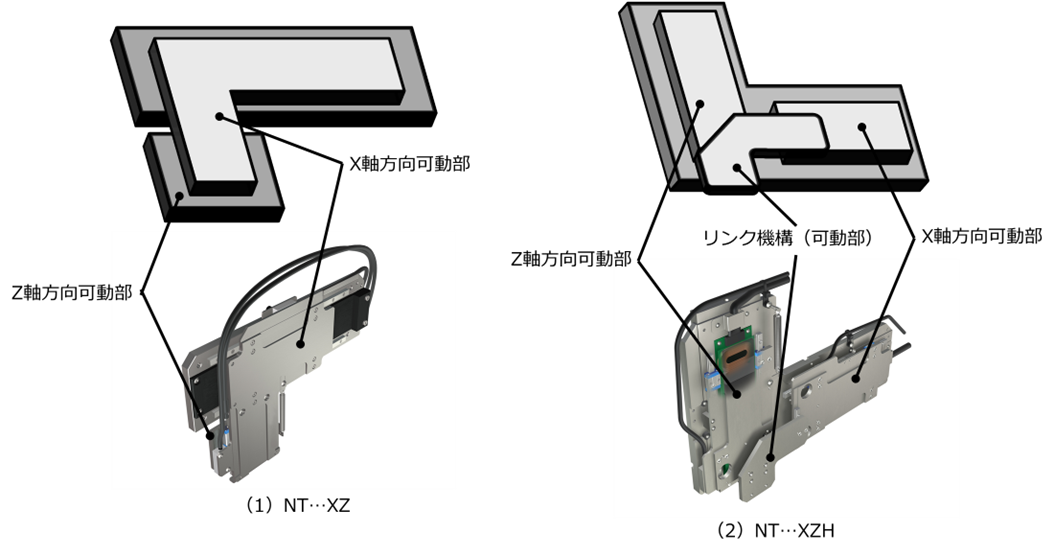
ナノリニアNT…XZHは、軽量ワークをつかんで移動し所定の位置に配置する動作に使用される、リニアモータ駆動のピック&プレイスユニットです。ピック&プレイスは、食品の仕分けや医療検査装置など軽量なワークを高速で扱う用途で使用されます。ピック&プレイス動作では「つかむ→移動→配置」という一連の動作を高速化するため、可動部の質量を最小化することが重要です。従来の標準シリーズであるナノリニアNT…XZ(下図・左)では、X軸方向に駆動する際、Z軸の可動部も一緒に移動する構造でした。そのため、X軸駆動時にZ軸の質量分も動作させるため、以下のような問題が発生します。
- 可動部の質量が大きい → モータの推力・加速度が制限される
- 加速に時間がかかる → タクトタイムが長くなる
ナノリニアNT…XZHでは可動部にリンク機構を採用することでこの課題を解決しました。リンク機構とは、複数の部品を連結し、動きを効率的に伝達する仕組みです。Z軸方向に動く際はリンク機構とZ軸方向の可動部、X軸方向に動く際はリンク機構とX軸方向の可動部が駆動する構造になっています。従来機のNT…XZと比較すると、NT…XZHの可動部質量は小さくなるため、より大きな加速度が得られ、タクトタイムの大幅短縮を実現できます。
まとめ
本稿では、推力の基本的な考え方から、ボールねじやリニアモータがどのように推力を生み出し、その推力をどのように評価すべきかを紹介しました。推力は、直動機構の性能や安全性を左右する重要な要素であり、正しく見積もるためには、負荷や摩擦といった「負荷と抵抗」、目標速度に至るまでの「加速と時間」、そしてモータが安全に出力できる範囲を判断する「実効トルク(推力)と定格トルク(推力)」の三つを理解することが欠かせません。
ボールねじとリニアモータはそれぞれ異なる特長を持ちますが、推力計算の基本的な考え方は共通しています。実際の設計では、理論値だけでなく、摩擦の変動や温度、ワーク重量のばらつきなど、現場で起こり得る条件も考慮することが重要です。
IKOでは、トルク(推力)及び限界加速時間の計算を支援する寿命計算ツールも公開していますので、モータ選定や装置設計の際にぜひご活用ください。
関連製品
本記事に関するIKOメカトロ製品の一部を以下に掲載しています。製品の詳細につきましては弊社までお問い合わせください。